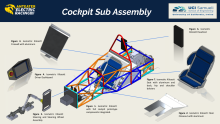
Formula SAE Electric - Brakes
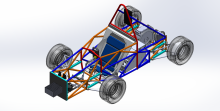
The brakes sub team aims to design a reliable and well-organized braking system for Anteater Electric Racing’s KiloZott, ensuring optimal performance, safety, and efficiency. To achieve this, the system will integrate regenerative braking to enhance energy recovery and feature configurable pedals for improved adaptability and driver preference. Whenever feasible, existing components will be incorporated to optimize cost and compatibility. A comprehensive CAD model will be developed prior to prototyping and assembly to ensure precision and minimize design iterations. This approach will result in an effective braking system that seamlessly integrates into the vehicle’s overall functionality, supporting the team's objectives in electric racing performance.