Dyno - Quadruped Robot
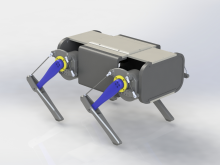
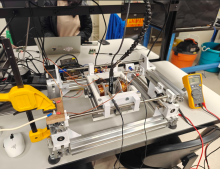
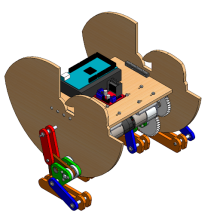
This is Project Dyno, a senior design project with the objective of designing, building, and prototyping a quadruped robot dog capable of serving as a disaster search and rescue aid in a low-cost package. We were inspired to make a search and rescue robot in response to the recent hurricanes on the East Coast. The needs of a would-be disaster relief robot drive our major objectives: traverse adverse terrain, overcome small obstacles, and support integration with a claw. We were also inspired by Boston Dynamic’s SPOT robot, a quadruped robot that is extremely capable, but also extremely expensive, making it less accessible to local authorities. Dyno will be scaled down in size and capability but still be able to serve in search and rescue operations.