
This project focuses on developing an autonomous drone system capable of real-time 3D mapping and environmental perception. Traditional inspection and mapping processes are often time-consuming, labor-intensive, and unsafe in complex environments such as construction sites or disaster areas. Our system addresses this problem by integrating onboard sensing and computing to enable automated data collection and mapping. This project is relevant to industries such as infrastructure inspection, search and rescue, and environmental monitoring, where efficient and safe data acquisition is critical.
The courses for the capstone projects in the Department of Electrical Engineering and Computer Science (EECS 159A/B) are run by Assistant Professor Maxim Shcherbakow and end with the end of the UCI winter quarter.

EECS
2025-2026 - Fall, Winter
3D Printed Microscope Using AI/ML Image Recognition for Automated Cell Counting
Cell counting within cell biology labs is a tedious process that is done manually. The 3D-printed microscope using AI/ML Image Recognition provides a cost-effective and efficient solution that streamlines this process. The 3D-printed open-source microscope is affordable and intuitive to use for capturing images of cells. When used in tandem with open-source artificial intelligence cell counting software, biology labs can now effectively count cells at a fraction of the time it takes to count these cells by hand.
EECS
2025-2026 - Fall, Winter
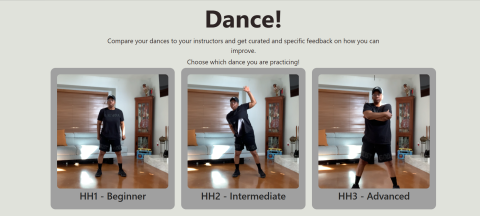
3Dance
3Dance is a tool designed to help users safely learn and practice dance by comparing their movements to instructor videos in real time. Using OpenPose pose estimation, it tracks body key points and provides accuracy feedback, achieving about 3% error compared to human instructors while operating at up to twice the original video speed. The system also delivers real-time feedback at 10–30 fps, making it practical for live practice. Developed as part of a 2025 academic project, it focuses on providing accessible, real-time dance training through motion analysis.
EECS
2025-2026 - Fall, Winter
AI-Enabled Automated Greenhouse System Using Raspberry Pi and Predictive Environmental Modeling
This project addresses the challenge of maintaining healthy greenhouse conditions without constant manual monitoring and intervention. Our team developed an AI-enabled automated greenhouse system that monitors soil moisture, temperature, and humidity, then automatically regulates irrigation and lighting to support plant growth. The project matters because it demonstrates how embedded systems, IoT devices, and machine learning can make plant care more efficient, consistent, and scalable. By reducing unnecessary watering and improving environmental stability, the system supports smarter and more sustainable small-scale agriculture. For more information, please access our Final Project Report: https://drive.google.com/file/d/1TOLH5HtbCEyqZn1P6OdofzXTeMpmVzWa/view?u...

EECS
2025-2026 - Fall, Winter
AI-Powered Free-Roaming Animatronic
Interactive animatronics used in themed entertainment are often prohibitively expensive, typically costing thousands to tens of thousands of dollars, which limits their accessibility to large organizations and excludes smaller developers and venues. Additionally, many existing systems lack fully autonomous, real-time interaction capabilities and rely on scripted or remotely operated behaviors. This project addresses the need for a low-cost, scalable animatronic platform capable of engaging users through natural, personalized interaction. The work matters because it broadens access to immersive technology, benefiting smaller theme parks, museums, and independent creators while enhancing guest experiences.

EECS
2025-2026 - Fall, Winter
AquaDerm AI
Dehydration is a serious yet widely overlooked health condition that occurs when the body loses more fluid than it takes in, potentially leading to complications such as heat injury, kidney problems, seizures, and hypovolemic shock. Despite these risks, millions of people worldwide fail to monitor their hydration levels adequately. AquaDermAI addresses this gap by developing a dehydration-sensing wearable that measures key physiological indicators — skin moisture via galvanic skin response, heart rate via photoplethysmography, and body temperature via thermistor — to detect and predict dehydration in real time. This solution is broadly applicable across diverse populations, from athletes and construction workers to individuals managing chronic illnesses, empowering users to proactively maintain healthy hydration habits.

EECS
2025-2026 - Fall, Winter
AudioVisor
The AudioVisor project addresses the difficulty individuals with hearing impairments experience in perceiving and localizing sounds within their environment. Many everyday situations depend on auditory awareness, such as recognizing conversations, alarms, or approaching hazards, which can significantly impact safety and communication. This project functions by converting sound signals into visual cues that represent both the direction and intensity of surrounding audio in real time. By providing an alternative method to interpret environmental sounds, the AudioVisor enhances situational awareness and supports greater independence for individuals who are deaf or hard of hearing.
EECS
2025-2026 - Fall, Winter
AuraBot: An Edge AI Desk Wellness Companion
Prolonged sitting is common in modern study and work environments, particularly among students and office workers who spend long hours at a desk. This sedentary behavior can contribute to health issues such as reduced physical activity and musculoskeletal strain. AuraBot addresses this problem by acting as an edge-AI desktop companion that monitors user presence, tracks sitting duration, and provides timely wellness reminders through sensing and voice interaction. By integrating these features into a low-friction desktop system, AuraBot aims to encourage healthier work habits and regular movement during long work sessions.

EECS
2025-2026 - Fall, Winter
AutoPill Dispenser
Auto-Pill Dispenser was developed to address the problem of medication non-adherence among elderly and disabled patients who may forget doses, take the wrong quantity, or rely on caregivers for daily medication management. Traditional pill organizers still require manual sorting and tracking, while many existing automated dispensers are too expensive for widespread use. This project proposes a low-cost smart dispensing system that combines a 3D-printed mechanical design, embedded control, sensors, and a web interface to automate scheduled medication delivery. The project matters because missed or incorrect doses can seriously affect patient health, and the people most affected are seniors, individuals with chronic health conditions, and caregivers who need a more reliable and affordable medication management tool.
EECS
2025-2026 - Fall, Winter
Buoyancy Engine CAN Communications (BECAN)
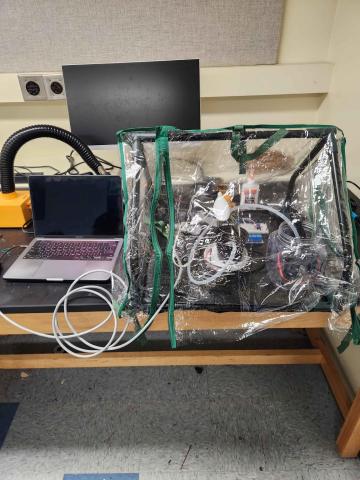
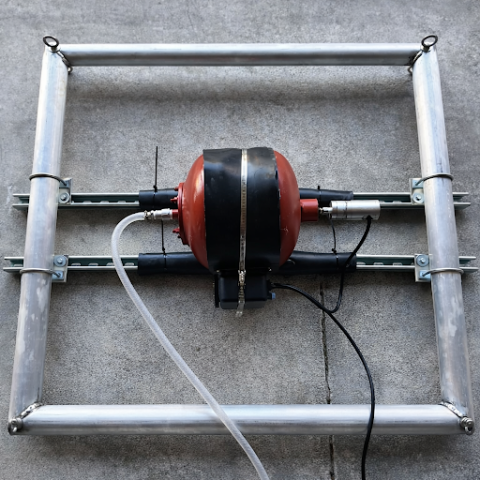
Buoyancy Engine CAN Communications (BECAN) is a user-controlled buoyancy engine designed to regulate the depth of a buoyant platform in aquatic environments. Precise depth control remains a significant engineering challenge for applications such as autonomous underwater vehicle docking and environmental monitoring. BECAN addresses this need by enabling controlled adjustment of system buoyancy through regulated water intake and release. This system provides a potential solution for industries and environmental agencies that require reliable underwater positioning and adaptive response to changing conditions.

EECS
2025-2026 - Winter
Collaborative Edge–Cloud Machine Learning for Wildfire Detection
Wildfires pose a significant threat to ecosystems, infrastructure, and public safety, creating a need for faster and more reliable detection systems. This project develops a collaborative edge–cloud architecture that integrates environmental sensors, UAV imagery, and machine learning models to detect wildfire ignition early. Edge-based models provide fast, low-power detection, while cloud-based models verify events using high-accuracy image analysis. This system improves detection speed, reduces false alarms, and enables monitoring in remote or resource-limited environments.
EECS
2025-2026 - Fall, Winter
CubeSat Avionics and Attitude Control System
The CubeSat Avionics and Attitude Control System focuses on developing flight software for a 2U (10x10x20 cm) nanosatellite. We designed algorithms to control the attitude, or orientation, of the satellite using only magnetorquers. A magnetorquer is a coil of wire that generates a localized magnetic field when a current goes through it; this magnetic field produces a torque to turn the satellite. Our software drives the magnetorquer to achieve detumbling, spin stabilization, and inertial pointing of the satellite.

EECS
2025-2026 - Fall, Winter, Spring
CubeSat Avionics and Attitude Control System
CubeSat ADCS requirements are driven by tight power/mass budgets yet mission success depends on reliable detumbling and pointing. We are building a magnetorquer-only ADCS and avionics stack for a 2U CubeSat that uses multi-mode control (B-dot detumble, spin stabilization, and inertial pointing) and FreeRTOS-based flight software on STM32, validated via hardware-in-the-loop simulation.
EECS
2025-2026 - Fall, Winter
Dance Pose Estimation
The Dance Pose Estimation project addresses the challenge of providing individualized feedback to large groups of dancers by creating an automated 3D pose evaluation web application. Traditional dance education often lacks the resources for instructors to give every student personalized instruction, which can slow down the learning process during private practice. By utilizing computer vision to compare student movements against a reference routine, the system empowers students to refine their technique independently while allowing instructors to focus on high-level group guidance. This project matters because it bridges the gap between digital accessibility and professional dance pedagogy, directly benefiting students and educators at institutions like the UCI Department of Dance.

EECS
2025-2026 - Fall, Winter
Design and Fabrication of Programmable UGVs for Wireless Research
Wireless communication research requires testing and verification in constantly changing environments. However, existing wireless testing platforms are costly, difficult to operate, or offer limited user configurability. This project presents a practical, low-cost, vehicle-based wireless research platform designed to address these limitations. By using affordable off-the-shelf components, we have developed an adaptable wireless network testing interface that is user friendly and easily configurable, providing a reliable and flexible testbed for experimental research.
EECS
2025-2026 - Fall, Winter
EchoSafe
Industrial environments often require workers to interact closely with robotic machinery, creating safety risks during operation and maintenance. This project addresses the need for a safer and more responsive control interface by developing EchoSafe, a low-power edge-AI speech keyword detection system. The system allows operators to control machinery using voice commands such as “go” and “stop,” reducing the need for manual interaction near hazardous equipment. By running entirely offline, the system also improves reliability, security, and privacy compared to cloud-based voice systems.

EECS
2025-2026 - Fall, Winter
Electromyography (EMG) Controlled Prosthetic Hand
Traditional prosthetics are often prohibitively expensive, ranging from $5,000 to over $100,000, and frequently require invasive medical procedures to function. This leaves many individuals in need of amputee care unable to afford or comfortably access life-changing mobility aids. To address this critical accessibility issue, our project developed a low-cost, electromyography (EMG) controlled prosthetic hand that utilizes a non-invasive dry-electrode placed on the user's wrist. By eliminating the need for invasive procedures and drastically reducing manufacturing expenses, this project demonstrates the viability of highly accessible, neural-network-driven prosthetics for a broader demographic
EECS
2025-2026 - Winter
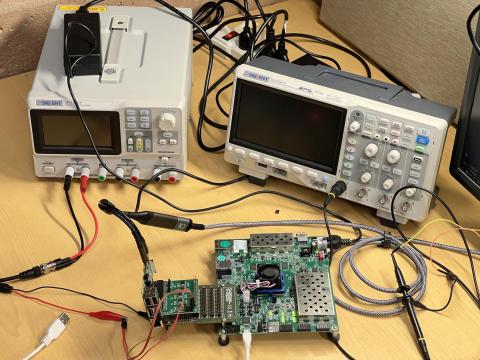
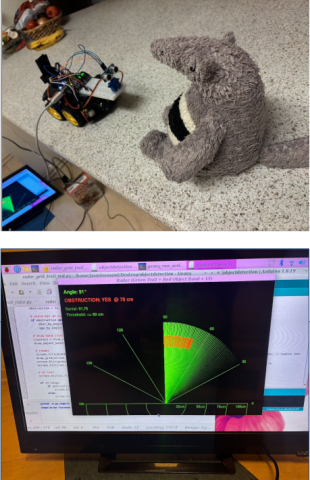
Embedded Autonomous Navigation and Real-Time Radar Visualization System
This project presents the design and implementation of an embedded autonomous navigation system featuring real-time ultrasonic radar visualization. Originally conceptualized as a Smart Digital Closet, the project's scope was strategically redefined to focus on a technically rigorous robotics platform capable of environmental scanning and autonomous decision-making. The system addresses the need for low-latency obstacle detection in mobile robotics by providing a 180 spatial awareness interface. This work is significant for developing accessible, real-time sensing solutions for autonomous indoor vehicles.
EECS
2025-2026 - Fall, Winter
Facial-Orientation and Concentration Understanding System (FOCUS)
The Facial-Orientation and Concentration Understanding System (FOCUS) addresses the growing challenge of maintaining attention among young students, particularly those with ADHD or focus-related difficulties, in learning environments. Many students struggle with sustained concentration during independent work, and there is a lack of accessible, real-time tools that provide immediate, personalized feedback on attention levels. This project develops a webcam-based application that analyzes facial orientation, gaze direction, and behavioral indicators to detect inattention and deliver timely reminders. By supporting students, educators, and caregivers with actionable insights, FOCUS aims to improve engagement, learning outcomes, and overall academic performance.

EECS
2025-2026 - Fall, Winter
FogHacks
Low visibility caused by fog presents a significant safety challenge for drivers on the road. This project presents FogHacks, an AI powered hazard detection system designed to detect road hazards in foggy environments using image detection ML models and defogging algorithms. The system integrates a Raspberry Pi 5 with a Pi Camera to capture real world images then utilizes defogging techniques to improve visibility before performing object detection. A customized YOLOv10 model was trained on road sign and foggy driving datasets to identify key road hazards such as cars, buses, bicycles, pedestrians, and traffic signs. To improve detection performance under foggy conditions, two defogging techniques, Contrast Limited Adaptive Histogram Equalization (CLAHE) and Dark Channel Prior (DCP), were implemented in the preprocessing pipeline. Testing on this custom model found improvements in accuracy as compared to the base YOLOv10 model, with some variation in results due to factors such as glare...
EECS
2025-2026 - Fall, Winter
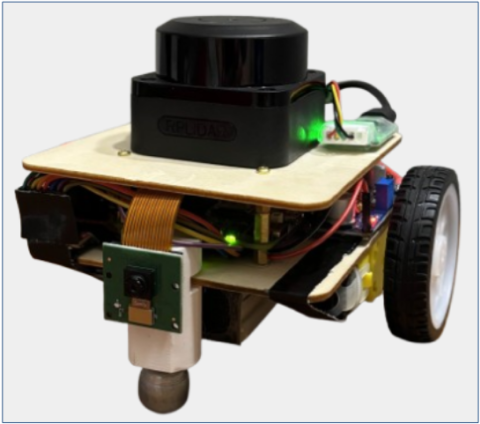
HERMES: Hazardous Environment Reconnaissance and Mapping Exploration System
Disaster situations require a swift and agile response to identify all victims in hazardous environments, but human efforts may be limited due to environmental severity. HERMES is an autonomous robotic system composed of a compact robot and a centralized server that will aid rescue operations. Rather than relying on a static map, the server utilizes behavior trees to drive autonomous decision-making. This framework enables the robot to systematically explore unknown spaces by dynamically balancing thorough area coverage with victim identification. At deployment, the controller synthesizes sensor data to localize the robot, map victim positions, and ensure autonomous, collision-free navigation.

EECS
2025-2026 - Fall, Winter
High Frequency Trading Project
The global financial markets process trillions of dollars daily, making microsecond-level order execution critical for high-frequency trading (HFT) profitability. Standard CPU-based trading engines often struggle with performance bottlenecks due to sequential execution and memory access limitations. This project addresses the need for ultra-low-latency, high-throughput computing to execute large volumes of trades in real time. By overcoming software limitations, the system provides a scalable solution that benefits modern financial institutions and traders relying on speed and reliability. The system utilizes a hybrid hardware-software architecture, employing an FPGA-based Tensor Processing Unit (TPU) to run a lightweight neural network for intelligent order placement. A novel FPGA-based MultiQueue BRAM architecture is used for deterministic, parallel order matching. Meanwhile, the host computer manages over 100,000 orders using lock-free Red-Black Trees for cache-efficient, large-scale storage. The machine learning component leverages a Proximal Policy Optimization (PPO) reinforcement learning agent to dynamically rank trades for caching in...

EECS
2025-2026 - Fall, Winter
HoloPhase
HoloPhase is a projection system designed to render clear images through dynamically changing turbid media such as fog, where Mie scattering would otherwise blur and distort the projected content. Our approach combines computational optics, a Digital Micromirror Device (DMD)– based wavefront shaper, and a camera-in-the-loop optimization pipeline that iteratively updates the projected wavefront to compensate for scattering. By jointly designing the optical setup, fog chamber, and control software, we can recover higher-contrast, sharper images through fog than conventional, uncorrected projection.
EECS
2025-2026 - Fall, Winter
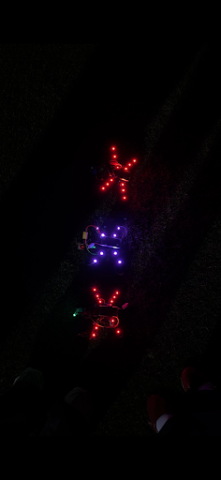
Light Show Drones
The Light Show Drones project was developed as an affordable and environmentally friendly entertainment system for personal events and small gatherings. The system consists of three drones that perform synchronized light displays and simple autonomous flight maneuvers, providing an engaging visual experience while remaining easy to operate for users with little or no prior drone experience.
Each drone was custom-built using a MOD-L frame, a Matek F405-WMN flight controller, T-Motor F1404 3800KV motors, and a Raspberry Pi Zero W co-processor. The Raspberry Pi runs Python-based software that coordinates flight operations and controls the attached WS2812B RGB LED strips. Navigation is supported by BE-880 GPS modules, while communication is handled through 2.4 GHz Wi-Fi for telemetry and 802.15.4 wireless links for rapid light-control signaling. The total replication cost for each drone was kept below $700.
Testing showed that the drones could maintain autonomous hovering within a...
EECS
2025-2026 - Fall, Winter
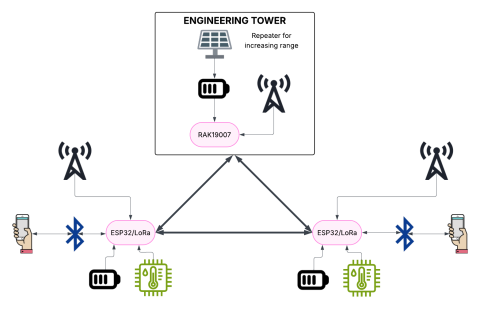
LoRa Communication System
Our project address the need for reliable, low-cost communication in areas where traditional networks (cellular or internet) are unavailable, unreliable, or compromised (such as during natural disasters, remote outdoor activities, or infrastructure outages). The project's goal is to create a decentralized, off-grid messaging networks using low-power LoRa radios, enabling users to communicate over long distances without centralized infrastructure. This project can be impactful for a wide range of individuals who depend on consistent access to communication in challenging or unpredictable environments, which can include outdoor enthusiasts, emergency responders, rural communities, and anyone requiring secure, infrastructure-independent communication.