
This project focuses on developing an autonomous drone system capable of real-time 3D mapping and environmental perception. Traditional inspection and mapping processes are often time-consuming, labor-intensive, and unsafe in complex environments such as construction sites or disaster areas. Our system addresses this problem by integrating onboard sensing and computing to enable automated data collection and mapping. This project is relevant to industries such as infrastructure inspection, search and rescue, and environmental monitoring, where efficient and safe data acquisition is critical.
EECS
2025-2026
Fall
Winter Competition/Extracurricular Project Sub-team
Winter Competition/Extracurricular Project Sub-team
3D Mapping Drone System

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
3D Printed Microscope Using AI/ML Image Recognition for Automated Cell Counting
Cell counting within cell biology labs is a tedious process that is done manually. The 3D-printed microscope using AI/ML Image Recognition provides a cost-effective and efficient solution that streamlines this process. The 3D-printed open-source microscope is affordable and intuitive to use for capturing images of cells. When used in tandem with open-source artificial intelligence cell counting software, biology labs can now effectively count cells at a fraction of the time it takes to count these cells by hand.
EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
3Dance
3Dance is a tool designed to help users safely learn and practice dance by comparing their movements to instructor videos in real time. Using OpenPose pose estimation, it tracks body key points and provides accuracy feedback, achieving about 3% error compared to human instructors while operating at up to twice the original video speed. The system also delivers real-time feedback at 10–30 fps, making it practical for live practice. Developed as part of a 2025 academic project, it focuses on providing accessible, real-time dance training through motion analysis.

CEE
2025-2026
Winter
Spring Industry Sponsored
Spring Industry Sponsored
5-Story Mid-Rise Office Building
Apex Lateral Design Group designed the structural system for a proposed five-story office building located in Irvine, California. The main problem addressed was the need to develop a safe, efficient, and compliant code design that could support everyday gravity and seismic lateral forces. Since the building is located in a seismically active region, this project was governed by the seismic design requirements rather than wind.
This project matters because a building's structural system directly affects the safety of life and performance in the long term, for which cost efficiency is imperative to meet those standards. The final design needed to protect future occupants and satisfy the architect's/clients' design goals, ensuring that the building could safely transfer loads from the roof all the way down into the underlying foundation/soil.
The project scope included the design of the gravity framing, lateral-force-resisting, steel members, connections, base plates, and foundation systems....
BME
2025-2026
Fall
Winter
Spring Industry Sponsored
Winter
Spring Industry Sponsored
Adiflo
Regenerative Medicine
Regenerative medicine focuses on repairing, replacing, or restoring damaged tissue and organs by using the body's own repair mechanisms.
An untapped resource in this field is the use of fat (adipose) tissue.
Through the mechanical processing, fat tissue is processed into smaller particles while preserving regenerative cellular components. This fat, commonly referred to as nanofat, can be used for regenerative properties in applications such as wound healing, scar treatment, and skin rejuvenation.
The Problem
Currently, fat processing methods rely on manual emulsification techniques, where surgeons repeatedly transfer fat between two connected syringes to mechanically break down and process the tissue (video shown). This method leads to inconsistencies in fat tissue particle size and processing efficiency, increasing the risk of infection during regenerative therapeutic procedures. While this method is widely used, there is an clinical unmet need...

MAE
2025-2026
Fall
Winter Competition/Extracurricular Project Sub-team
Winter Competition/Extracurricular Project Sub-team
AeroMed Quadcopter
Urban traffic and traditional delivery methods often delay the arrival of critical medications, especially during peak hours. Currently, pharmaceutical logistics rely on pollutant-emitting vehicles that group multiple orders together, leading to slow delivery times and unnecessary human contact. There is a clear need for a faster, greener, and more isolated delivery method to ensure patients receive 1lb payloads safely and efficiently.
This project addresses these issues by developing an autonomous drone capable of delivering medical supplies directly to a client’s landing pad. By using aerial navigation, the system bypasses road congestion, reduces transportation costs, and eliminates tailpipe emissions. This matters because it provides a reliable, "no-contact" service that is essential for time-sensitive healthcare.
The project directly benefits pharmacists, delivery operators, and local businesses by streamlining their distribution. Most importantly, it supports homebound or disabled clients who require secure, direct access to medication. It also considers...

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
AI-Enabled Automated Greenhouse System Using Raspberry Pi and Predictive Environmental Modeling
This project addresses the challenge of maintaining healthy greenhouse conditions without constant manual monitoring and intervention. Our team developed an AI-enabled automated greenhouse system that monitors soil moisture, temperature, and humidity, then automatically regulates irrigation and lighting to support plant growth. The project matters because it demonstrates how embedded systems, IoT devices, and machine learning can make plant care more efficient, consistent, and scalable. By reducing unnecessary watering and improving environmental stability, the system supports smarter and more sustainable small-scale agriculture. For more information, please access our Final Project Report: https://drive.google.com/file/d/1TOLH5HtbCEyqZn1P6OdofzXTeMpmVzWa/view?u...

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
AI-Powered Free-Roaming Animatronic
Interactive animatronics used in themed entertainment are often prohibitively expensive, typically costing thousands to tens of thousands of dollars, which limits their accessibility to large organizations and excludes smaller developers and venues. Additionally, many existing systems lack fully autonomous, real-time interaction capabilities and rely on scripted or remotely operated behaviors. This project addresses the need for a low-cost, scalable animatronic platform capable of engaging users through natural, personalized interaction. The work matters because it broadens access to immersive technology, benefiting smaller theme parks, museums, and independent creators while enhancing guest experiences.
BME
2025-2026
Fall
Winter
Spring Internally Mentored (faculty, staff, TA)
Winter
Spring Internally Mentored (faculty, staff, TA)
ANGel
Immune Innovation For Active Healing
ANGel is an engineered immune-activating hydrogel that accelerates healing by promoting rapid blood vessel regrowth.
Delayed tissue regeneration causes high failure chance for skin grafts:
160K Skin Grafts
Performed annually in the US treating burns and chronic wounds.
1 in 4 Fail
Procedures fail on average—leaving wounds open to chronic complications.
$32B Burden
Annual economic burden in the US from failed graft procedures.
Angiogenesis & Why It's Delayed
Angiogenesis is the process of new blood vessel formation, promoted by anti-inflammatory M2 macrophage signaling. Chronic inflammation prevents pro-inflammatory M1 macrophages to effectively differentiate into their pro-regenerative M2 state. When angiogenesis is prolonged, the risk of infection increases and likelihood of healing is decreases.
...
MAE
2025-2026
Winter
Spring Internally Mentored (faculty, staff, TA)
Spring Internally Mentored (faculty, staff, TA)
Anteater Airplane
To address the lack of standards and solutions from aircraft manufacturers, airlines, and the Federal Aviation Administration, our team is developing a custom wheelchair designed to ensure comfort, dignity and to reduce the number of transfers required for wheelchair users during air travel. This is due to air travel posing significant challenges for wheelchair users. When personal wheelchairs are handled by ground staff alongside luggage and other heavy cargo, they can often be returned damaged. This is particularly concerning because custom wheelchairs can cost over $30,000, and airlines typically provide limited accommodations or compensation for damage. Additionally, few solutions currently exist within commercial aviation to ensure comfort and safety for wheelchair users while boarding, during flight, and when deplaning. Although past efforts such as the Douglas CV-54C "Sacred Crow", Air4All, and Haycomp Eagle series have attempted to address accessibility, widespread implementation has been limited.

MAE
2025-2026
Winter
Spring Competition/Extracurricular Project Sub-team
Spring Competition/Extracurricular Project Sub-team
Anteater Baja Racing Driveline
The UCI Anteater Baja Racing team is a 30+ member team tasked with designing, building, and testing an off-road race car for the SAE Baja competition each year. We are a subset of the team working to design, fabricate, and validate a controllable driveline test bench (DTB) to experimentally evaluate driveshaft behavior under varying angles, loads, and rotational speeds. This project is to address a diagnostic platform for understanding driveline inefficiencies and enable future vehicle modifications to be made for the rest of the Anteater SAE team.

MAE
2025-2026
Winter
Spring Competition/Extracurricular Project Sub-team
Spring Competition/Extracurricular Project Sub-team
Anteater Baja Racing Driveline Angle Test Bench
The UCI Anteater Baja Racing (ABR) team designs, builds, and races an off-road vehicle each year in the SAE Baja intercollegiate competition. A six-person capstone sub-team sponsored by Cortek and T-Slots designed, fabricated, and validated a Driveline Test Bench (DTB) to experimentally characterize how driveshaft angle affects power transmission, vibration, and rotational speed through the vehicle's U-joints. The problem this addresses is real: driveline geometry is one of the most consequential packaging decisions in a Baja vehicle, yet ABR had no controlled way to measure its effects without expensive, time-consuming desert test days. The DTB provides a repeatable, lab-based platform for generating the data needed to inform setup decisions for ABR's next competition vehicle, Spectre, and for future teams going forward.

MAE
2025-2026
Winter
Internally Mentored (faculty, staff, TA)
Anteater Baja Racing Drivetrain (Phase 2)
The UCI Anteater Baja Racing team is a 30+ member team tasked with designing, building, and testing an off-road race car for the SAE Baja competition each year. We are a subset of the team working specifically on transferring power from the CVT output to all four wheels. Last year, our car performed well at the 2025 SAE Baja competition in Arizona. However, it performed under its potential due to lack of testing. This year, we are emphasizing the testing and redesign of our previous design, and as such, our modular transfer case will be easy to modify and test the optimal performance of our car, verifying the design improvements. We want to design two iterations of the modular transfer case through testing with the first iteration finished before the end of fall and the final iteration finished by the end of winter. We will also develop a new output shaft to the front...
CEE
2025-2026
Fall
Winter
Spring Industry Sponsored
Winter
Spring Industry Sponsored
Anteater Courtyard Structural Design
The Anteater Courtyard Apartments project develops the structural design for a three-story multi-family residential building with ground-level mixed-use space. The building uses a wood-framed superstructure supported by a concrete podium, and the design study places the project in Irvine, California to address seismic design considerations. The project responds to the need for a safe, practical, and serviceable structural system that can support residential occupancy while accommodating irregular building layouts, non-stacking walls, floor openings, and architectural constraints. Because the building has different framing conditions from floor to floor, the main design challenge is to create a clear load path that safely transfers roof, floor, wall, beam, post, and connection loads down to the podium and foundation.
The project scope includes establishing loading criteria, developing roof, third-level, and second-level beam layouts, selecting joist directions, sizing major beams and posts, choosing hanger connections, and reviewing the preliminary lateral force-resisting...

MAE
2025-2026
Fall
Winter Competition/Extracurricular Project Sub-team
Winter Competition/Extracurricular Project Sub-team
Anteater Electric Racing - Rear Suspension Redesign
The project focuses on designing a new rear suspension for the Anteater Electric Racing vehicle. Design focuses on simplicity to achieve reduced weight and cost, with improved serviceability through design for manufacturing and integration. The main focus lies within custom designed aluminum wheel hubs and welded sheet metal uprights, which were fabricated in-house at UCI’s student machine shop.

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
AquaDerm AI
Dehydration is a serious yet widely overlooked health condition that occurs when the body loses more fluid than it takes in, potentially leading to complications such as heat injury, kidney problems, seizures, and hypovolemic shock. Despite these risks, millions of people worldwide fail to monitor their hydration levels adequately. AquaDermAI addresses this gap by developing a dehydration-sensing wearable that measures key physiological indicators — skin moisture via galvanic skin response, heart rate via photoplethysmography, and body temperature via thermistor — to detect and predict dehydration in real time. This solution is broadly applicable across diverse populations, from athletes and construction workers to individuals managing chronic illnesses, empowering users to proactively maintain healthy hydration habits.
MAE
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
ARISE Autonomous Quadcopter
With advancements in technology and AI features, the ways of delivery are rightfully just to seek innovation for consumers. That in mind, the mission of this project is to design, build, and test a fully autonomous quadcopter that will be capable of carrying a 1-lb payload to a GPS waypoint 50 meters away, being able to detect the landing target, and releasing the payload gently within 1 meter of the specified landing zone. It will also have the ability to autonomously return to its starting point.

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
AudioVisor
The AudioVisor project addresses the difficulty individuals with hearing impairments experience in perceiving and localizing sounds within their environment. Many everyday situations depend on auditory awareness, such as recognizing conversations, alarms, or approaching hazards, which can significantly impact safety and communication. This project functions by converting sound signals into visual cues that represent both the direction and intensity of surrounding audio in real time. By providing an alternative method to interpret environmental sounds, the AudioVisor enhances situational awareness and supports greater independence for individuals who are deaf or hard of hearing.
EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
AuraBot: An Edge AI Desk Wellness Companion
Prolonged sitting is common in modern study and work environments, particularly among students and office workers who spend long hours at a desk. This sedentary behavior can contribute to health issues such as reduced physical activity and musculoskeletal strain. AuraBot addresses this problem by acting as an edge-AI desktop companion that monitors user presence, tracks sitting duration, and provides timely wellness reminders through sensing and voice interaction. By integrating these features into a low-friction desktop system, AuraBot aims to encourage healthier work habits and regular movement during long work sessions.

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
AutoPill Dispenser
Auto-Pill Dispenser was developed to address the problem of medication non-adherence among elderly and disabled patients who may forget doses, take the wrong quantity, or rely on caregivers for daily medication management. Traditional pill organizers still require manual sorting and tracking, while many existing automated dispensers are too expensive for widespread use. This project proposes a low-cost smart dispensing system that combines a 3D-printed mechanical design, embedded control, sensors, and a web interface to automate scheduled medication delivery. The project matters because missed or incorrect doses can seriously affect patient health, and the people most affected are seniors, individuals with chronic health conditions, and caregivers who need a more reliable and affordable medication management tool.

MAE
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
Backyard Bioremediation System - Teal Flow
Households produce considerable amounts of greywater each month, which comes from different sources, including showers and sinks. While there is potential for reusing greywater, the majority of it is still being wasted. This has resulted in increased environmental stress. This concern has been addressed by the Teal Flow Backyard Bioremediation System. The project aims at creating a small-scale solar-powered filtration unit for greywater recycling. The filtration system includes a natural filtration system, which includes plant-based bioremediation, sand filtration, and activated carbon. The system has sensors that measure critical parameters, including pH and TDS. The value of these sensors must be within specific limits for reuse. The project aims at helping residents reuse greywater for irrigation. This will help reduce water loss and decrease water consumption. The project aims at promoting water management strategies during water scarcity.
BME
2025-2026
Fall
Winter
Spring Industry Sponsored
Winter
Spring Industry Sponsored
BiteBio
BiteBio
Smart Mouthguard
A next-generation sports monitoring device for saliva-based biomarker detection. BiteBio stands for Biomolecular Intraoral Tracking & Evaluation, reflecting our focus on noninvasive intraoral biosensing for athlete health monitoring.
CBE
2025-2026
Spring
Industry Sponsored
Blue Methanol
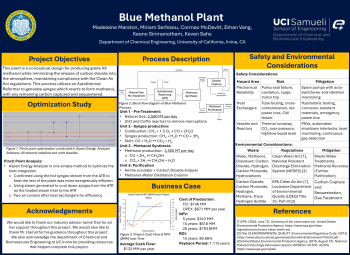
This report presents a technical and economic evaluation of a blue methanol plant designed to produce 3,500 metric tons per day of grade AA methanol with a product purity of 99.86%. The process consists of using natural gas feedstock, autothermal reforming, methanol synthesis, and carbon capture technologies to produce low-carbon methanol while achieving approximately 95% carbon dioxide emission capture. This complete technical package includes the development and design of the process, along with process simulation, equipment sizing, safety analysis, environmental considerations, and a techno-economic assessment.

MAE
2025-2026
Fall
Winter Competition/Extracurricular Project Sub-team
Winter Competition/Extracurricular Project Sub-team
Bubble Box
E-SONIC is UCI’s Engineering-Symphonic Orchestra New Instrument Competition, where student teams design new playable musical instruments. Bubble Box is our team’s project within E-SONIC, using controlled bubbles and vortex structures inside a clear water chamber to create a playful audio-visual instrument. The project explores how a fluid phenomenon can be made repeatable, expressive, portable, and safe enough for public demonstration while remaining visually engaging and intuitive to experience.

CEE
2025-2026
Winter
Spring Industry Sponsored
Spring Industry Sponsored
Bulbouts and Bike Lanes
This project was developed at the request of our client, a city in the greater Los Angeles urban area. They want to improve the safety, comfort, and accessibility of active transportation, particularly for pedestrians and cyclists. The target locations are in a dense residential area adjacent to the city's downtown. These neighborhoods have below-average rates of car ownership and stand to benefit from the improvements.
This project matters because the protection of resident safety is the primary goal. The region has a relatively high proportion of low- or no-car households. The city wants to prioritize these residents in the designs, providing them with suitable alternatives to driving. Grounding ourselves in the community's needs gave our engineering a personal touch. In the end, this active transportation project will serve the people. This will benefit those without easy access to cars, as they can now bike or...