
Background:
Keeping public areas such as parking lots clean is a pressing challenge due to their large size and frequent activity. With small items like empty soda or water bottles, it especially can be tedious, since traditional manual trash collection is labor-intensive, costly, time-consuming, and requires constant human involvement. Therefore, this project is offering an alternative solution that will streamline, and automate litter and trash collection. By utilizing advanced robotic and camera detection concepts paired with mechanical design, an Unmanned Ground Vehicle (UGV) will efficiently and independently locate, retrieve, and return empty soda cans or water bottles in public parking lots.
Goals and Objectives:
-
A goal is to reduce the constant human involvement that is often in litter collection.
-
Promote cleanliness in public spaces, and reduce manual labor.
-
-
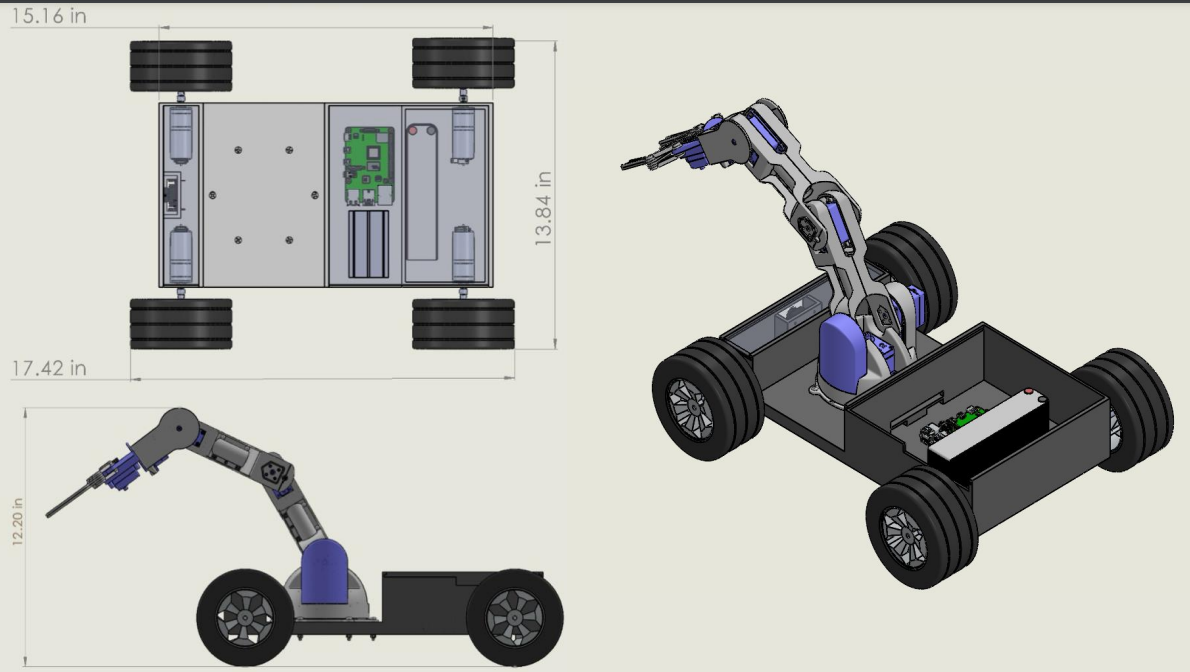
The objective is to design and build a UGV that autonomously locates, retrieves, and returns an empty water bottle in a parking lot all within 4 minutes
-
Retrieve the bottle using a mechanical arm and clamp, without the use of adhesives/glue.
-
Use wired or wireless manual control as a safe backup control method.
-
During the fall quarter, we will establish the UGV's preliminary design, including a basic structure, components, bill of materials, and control algorithms. By the winter quarter, the final design will be presented, with the full detailed model, structural analysis, control modes, and software code, with manufacturing slated to begin shortly thereafter. A product demonstration is planned for March 30, 2025.
Sustainability & Social Impact
Autonomous robots like this UGV have the potential to make significant contributions to sustainability and society. Their uses can be broadened past the constraints of this project. By automating precise and efficient retrieval tasks, UGVs could assist in recycling operations, collecting and sorting bottles and waste more effectively, thus minimizing environmental impact. They can also help reduce human involvement in hazardous or repetitive activities, which can make way for safer workplaces. Exploring a different path, and mass-producing UGVs could also be another way to expand their functionality and applications. UGV's have potential in various industries, from automated waste management to agricultural applications. For example, fleets of UGVs could autonomously retrieve litter in public spaces like festivals and parks, reducing resource wastage and promoting eco-friendly practices.
Team Presentation:
Problem Definition Presentation
Preliminary Design Review Presentation (11/14/24)
Problem Redefinition Presentation
Team Contacts:
Isaac Larroque (ilarroqu@uci.edu)
Tianyou Xu (tianyox2@uci.edu)
Lilas Khalek (lkhalek@uci.edu)
Zachary Okazaki (zokazaki@uci.edu)
Katherine Tran Nguyen (trannn8@uci.edu)
Aditya Amit Honap (ahonap@uci.edu)
Sponsor:
Simens
Northrop Grumman
Advisor:
Shorbagy Mohamed (mohamem2@uci.edu)
Professor David Copp (dcopp@uci.edu)
James Heckendorn