
Background
Around 95% of the ocean remains undiscovered. Due to extreme depths, unpredictable currents, and limited human accessibility, direct monitoring of marine ecosystems presents significant challenges. Challenges that include depth limitations, high costs, and potential environmental disturbances. As a result, many aspects of marine life remain largely unmonitored.
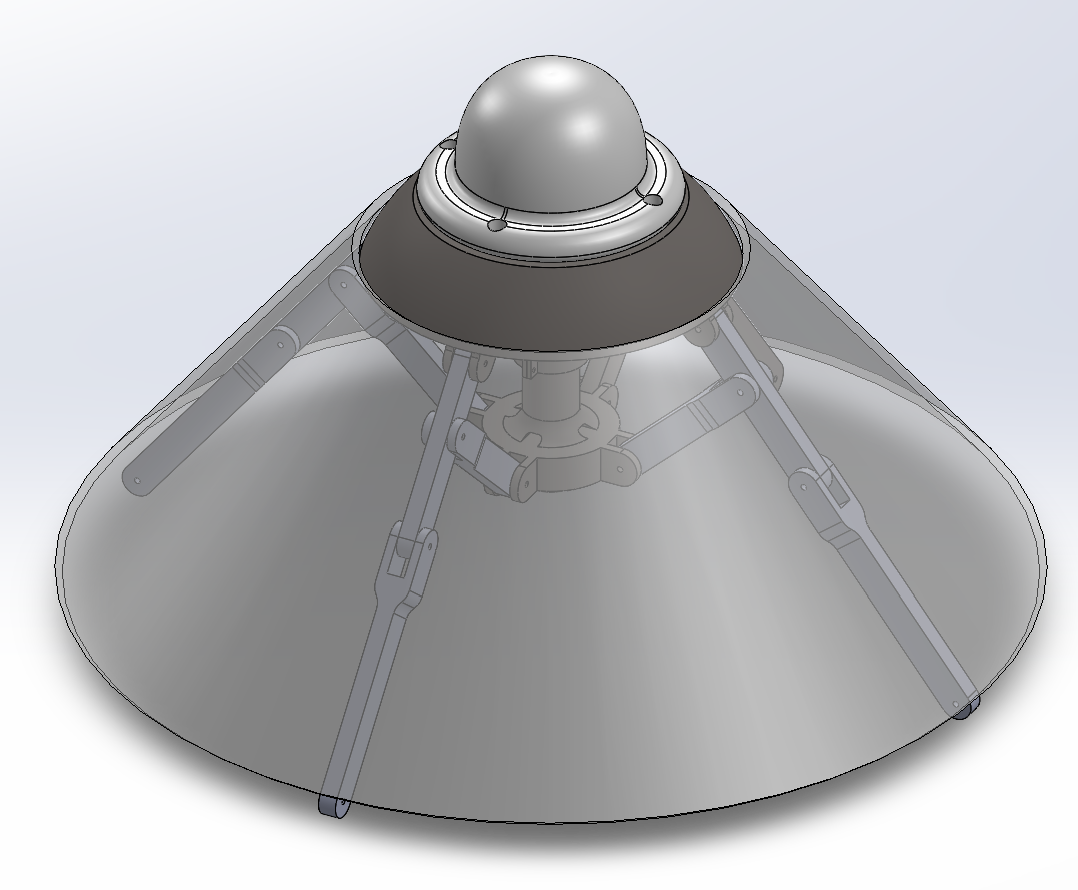
Our senior design project aims to address these challenges through a jellyfish-inspired robot. Being one of the most efficient swimmers in the ocean, the biomechanics of the jellyfish serves as the basis of our robot. Using linkages to replicate their motion, our robot will provide a non-intrusive and efficient means of monitoring the marine environment. While other jellyfish robots do exist, ours will be the first to merge linkages with the energy efficient actuation systems of the jellyfish for long-term marine exploration.
Goals and Objectives
The goal of this project is to develop a bioinspired jellyfish robot capable of operating 1-2 meters below the surface of the water. During its exploration,, the robot must analyze its surrounding environment while causing minimal disturbance to the local ecosystems. Its analysis includes recording visual or numerical data on the temperate, salinity levels, pH levels, and presence of pollutants in the water.
Winter 2025:
- Week 1-2: Problem Definition, Sponsor Interview, Team Contract;
- Week 3: Existing Solutions, System Decomposition
- Week 4: System Requirements, Function Generation, Concept Generation;
- Week 5: Concept Selection and Analysis
- Week 6-7: Preliminary Design Review, Individual Component Analysis, Complete CAD Model, Parts List
- Week 8: Manufacturing
- Week 9: Complete Physical Prototype, Design Review
- Week 10: Demo Component, Complete Preliminary Design, Finalize Design Report
Spring 2025:
- Week 1: Complete control code for the robot, perform testing on Prototype A
- Week 2-3: Finalize sensors and camera placement
- Week 4-8: Generate Prototype B
Sustainability & Social Impact
Our project promotes sustainability by offering a non-intrusive method for monitoring marine ecosystems, reducing the need for human intervention and minimizing disruption to surrounding aquatic life. By collected specific environmental data, the JellyfishBot can help researches track ocean health, pollution levels, and climate change effects over time. Its bioinspired design also serve as a model for underwater robotics, serving as a stepping stool for future development in marine exploration.
Team Contacts
Khine Thazin Myint | ktmyint@uci.edu
Warner Wu | warnerw1@uci.edu
May Maung | Maungmp@uci.edu
Fadeel Attaullah Sheikh | sheikhfa@uci.edu
Cristina De La Cruz | delacrc4@uci.edu
Daniel Ho Yu Chen | chendh1@uci.edu
Sponsors
Professor John Michael McCarthy | jmmccart@uci.edu
Professor Sasha Voloshina | avoloshi@uci.edu