MORF NX

Project Background:
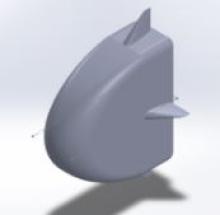
For this Spring quarter project, Team MorfNX will be utilizing NX’s topology optimization tool to redesign an air duct for the 2008X X-series aircraft oil cooler. The team will examine the entire engine and cooling assembly as a whole, figuring out the maximum amount of volume the air duct can occupy (defining the design space), place geometry constraints, and boundary conditions in which the iterations of design will be fine-tuned and simulated using StarCCM+. By combining the power of topology optimization and computational fluid analysis, the team will come up with a design that can maximize the airflow for the cooling system.