
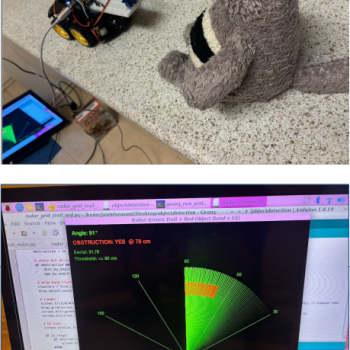
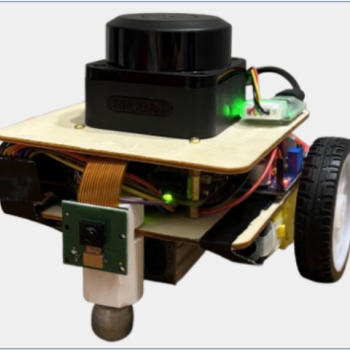
This project presents the design and implementation of an embedded autonomous navigation system featuring real-time ultrasonic radar visualization. Originally conceptualized as a Smart Digital Closet, the project's scope was strategically redefined to focus on a technically rigorous robotics platform capable of environmental scanning and autonomous decision-making. The system addresses the need for low-latency obstacle detection in mobile robotics by providing a 180 spatial awareness interface. This work is significant for developing accessible, real-time sensing solutions for autonomous indoor vehicles.
EECS
2025-2026
Winter
Internally Mentored (faculty, staff, TA)
Embedded Autonomous Navigation and Real-Time Radar Visualization System
BME
2025-2026
Fall
Winter
Spring Industry Sponsored
Winter
Spring Industry Sponsored
EMBRACE
How EMBRACE Began
EMBRACE began as a Siemens-sponsored senior design capstone project through UC Irvine’s Biomedical Engineering program. The original project concept explored adaptive prosthetic control through biosignal processing and machine learning.
As our interdisciplinary team of biomedical engineering and computer science students formed, we brought together expertise in hardware design, signal acquisition, controls, and machine learning to refine the concept into a practical solution. This collaboration ultimately shaped EMBRACE into a portable EMG-controlled prosthetic system designed for intuitive and accessible upper-limb assistance.
CBE
2025-2026
Spring
Industry Sponsored
Ethyl Lactate - Commercial BioBased Green Solvent
Ethyl lactate is one of the few solvents that is fully renewable, biodegradable, and non-toxic while still performing like the petroleum-based solvents it can replace. Its low toxicity and skin-friendly profile make it valuable beyond industrial cleaning and coatings: it is used in pharmaceuticals as a green solvent for drug formulation, controlled drug delivery, and as a chiral building block in drug synthesis, and in cosmetics and personal-care products such as creams, lotions, and fragrances. Most conventional solvents, by contrast, come from petroleum and are often toxic, volatile, and environmentally persistent, posing risks to workers and a growing regulatory burden. This project designs a full-scale plant to produce ethyl lactate from renewable lactic acid and ethanol. The scope is the complete process design — reaction, separation, and purification to 99.9% purity — plus the heat-integration, environmental, safety, and economic analyses needed to judge whether the plant is technically sound...
EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
Facial-Orientation and Concentration Understanding System (FOCUS)
The Facial-Orientation and Concentration Understanding System (FOCUS) addresses the growing challenge of maintaining attention among young students, particularly those with ADHD or focus-related difficulties, in learning environments. Many students struggle with sustained concentration during independent work, and there is a lack of accessible, real-time tools that provide immediate, personalized feedback on attention levels. This project develops a webcam-based application that analyzes facial orientation, gaze direction, and behavioral indicators to detect inattention and deliver timely reminders. By supporting students, educators, and caregivers with actionable insights, FOCUS aims to improve engagement, learning outcomes, and overall academic performance.
MAE
2025-2026
Fall
Winter Competition/Extracurricular Project Sub-team
Winter Competition/Extracurricular Project Sub-team
Fluid Power Vehicle Challenge - Zot Under Pressure
The Fluid Power Vehicle Challenge is a national competition among universities hosted by the National Fluid Power Association that challenges students to implement a hydraulic braking and power system to a human powered vehicle. The competition consists of 4 events, which test the speed, endurance, efficiency, and regenerative braking capabilities of the vehicle. We, Zot Under Pressure, are creating a tricycle that converts human input into hydraulic power, focusing on speed and endurance. Our team will represent UCI in the competition and showcase the applications of hydraulic power.

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
FogHacks
Low visibility caused by fog presents a significant safety challenge for drivers on the road. This project presents FogHacks, an AI powered hazard detection system designed to detect road hazards in foggy environments using image detection ML models and defogging algorithms. The system integrates a Raspberry Pi 5 with a Pi Camera to capture real world images then utilizes defogging techniques to improve visibility before performing object detection. A customized YOLOv10 model was trained on road sign and foggy driving datasets to identify key road hazards such as cars, buses, bicycles, pedestrians, and traffic signs. To improve detection performance under foggy conditions, two defogging techniques, Contrast Limited Adaptive Histogram Equalization (CLAHE) and Dark Channel Prior (DCP), were implemented in the preprocessing pipeline. Testing on this custom model found improvements in accuracy as compared to the base YOLOv10 model, with some variation in results due to factors such as glare...

MAE
2025-2026
Winter
Spring Internally Mentored (faculty, staff, TA)
Spring Internally Mentored (faculty, staff, TA)
Formula Friction: Brake Dynamometer
The braking system of an FSAE Electric vehicle operates under highly transient thermal and mechanical conditions, where frictional heating, material behavior, and heat dissipation strongly influence performance and reliability. During repeated or high-energy braking events, rotor and pad temperatures can rise rapidly, altering the effective coefficient of friction and therefore modifying brake torque generation, stopping distance, and vehicle deceleration. Understanding these temperature-dependent effects is essential for accurate brake modeling, safe design margins, and competition performance.
MAE
2025-2026
Winter
Spring Internally Mentored (faculty, staff, TA)
Spring Internally Mentored (faculty, staff, TA)
Formula Friction: Brake Rotor Dynamometer
The braking system of an FSAE Electric Vehicle operates under highly transient thermal and mechanical conditions, where frictional heating, material behavior, and heat dissipation strongly influence performance and reliability. During repeated or high-energy braking events, rotor and pad temperatures can rise rapidly, altering the effective coefficient of friction and therefore modifying brake torque generation, stopping distance, and vehicle deceleration. Understanding these temperature-dependent effects is essential for accurate brake modeling, safe design margins, and competition performance.
MAE
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
Fuel Blending System Control and Demonstration
The UCI Combustion Laboratory tasked our team with updating their currently outdated hardware and control program for their gas mixing station.
The laboratory was previously using twenty-year-old FieldPoint hardware and software to control their gas mixing station, which is used to mix different gas compositions for combustion research. These experiments are critical for understanding fuel behavior, improving energy efficiency, and supporting safer and more sustainable combustion systems in industrial and aerospace applications.
Due to the entirety of the gas mixing station being outdated, a complete overhaul of both the hardware and software was required to ensure that the system would remain operable into the future. Additionally, new functionality was needed to ensure accurate gas mixing under high-pressure conditions (approximately ten atmospheres), including implementing an internal validation check to ensure the specific gravity of the gas composition matches the theoretical...
CBE
2025-2026
Spring
Internally Mentored (faculty, staff, TA)
Green Ammonia Plant
Ammonia is a globally indispensable chemical commodity because it serves as the foundational building block for agricultural fertilizers. Without it, commercial farming operations could not sustain the food supply required for the general population. It is also becoming a vital, carbon-free energy carrier used to transport hydrogen cleanly across the world. Traditional "grey ammonia" relies on burning fossil fuels, like natural gas or coal, to extract the hydrogen needed for the process. Because this current method is so heavily dependent on hydrocarbons, it releases massive amounts of carbon dioxide, making the chemical industry a huge contributor to global greenhouse gas emissions. This project designs a "green ammonia" facility that completely eliminates fossil fuels from the production lifecycle. Instead of reforming hydrocarbons, the plant uses clean thermal and electrical energy from small modular nuclear reactors to power high-temperature steam electrolysis, splitting water into clean hydrogen. This hydrogen is then combined...

CBE
2025-2026
Spring
Internally Mentored (faculty, staff, TA)
Green Ammonia Plant
Ammonia is a widely used industrial chemical, primarily in fertilizer production, and is also gaining attention as a potential carbon-free energy carrier due to its high hydrogen content and established global distribution infrastructure. However, conventional ammonia production is heavily dependent on fossil fuels, particularly through steam methane reforming, which results in significant greenhouse gas emissions. As a result, there is growing interest in alternative low-carbon production pathways.
This project focuses on the design and simulation of a green ammonia production process powered by renewable electricity. Hydrogen is produced through water electrolysis and subsequently combined with nitrogen in a Haber-Bosch-based catalytic synthesis loop to produce ammonia. The objective of the work is to develop a technically consistent and economically evaluable plant design that can be used for preliminary investment assessment.

CEE
2025-2026
Winter
Spring Industry Sponsored
Spring Industry Sponsored
Gridley Road Bridge
The Gridley Road Bridge project focused on developing a replacement design for an existing bridge located in Cerritos, California, that spans Interstate 91. The goal of the project was to evaluate the existing bridge plans and create a simplified structural design that demonstrates the engineering principles used in modern bridge design. The proposed replacement bridge was widened to accommodate increased traffic demands and improved pedestrian accessibility while maintaining structural safety and efficiency. The project addressed the need for aging infrastructure upgrades and provided insight into how bridges are analyzed, designed, and modified to meet changing transportation needs. Communities that rely on this bridge, including motorists, pedestrians, and local agencies responsible for transportation infrastructure, are directly affected by the performance and reliability of structures such as the Gridley Road Bridge. Through this project, our team gained practical experience applying industry design standards and understanding the challenges associated with real-world bridge...

MAE
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
Grocery Store Robot: Arm Manipulation
Modern grocery stores and warehouses still rely heavily on manual labor to fulfill item retrieval tasks from shelves. This process is time-consuming, labor-intensive, and prone to inefficiencies as order volumes continue to grow. There is an increasing demand for automated systems that can improve operational efficiency while maintaining safety and precision in retail and warehouse environments.
This project focuses on the development of an autonomous robotic arm capable of retrieving items from shelves in a grocery store setting. The system aims to perform precise, collision-free grasping of target items while operating in a constrained shelf environment. By automating repetitive picking tasks, the project seeks to improve efficiency and reduce the reliance on manual labor in grocery fulfillment operations.
The project is sponsored by Professor Solmaz Kia and developed by a student team in the MAE capstone design program. The primary stakeholders include grocery store operators,...

MAE
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
Grocery Store Robot: Base Team
The goal of the project is to create a proof-of-concept for an autonomous robot to aide in grocery/retail stores. This robot would be would be assigned items to grab, and it would plan an optimized path to retrieve the items. This project is split into two teams; our team focuses on the robotic base that allows for movement and navigation. The base of the robot must be able to localize itself and plan a path to and from the target. If during operation the robot should detect an obstruction, the robot needs to recalculate a path around it while leaving adequate space to avoid collision. In addition to the functions above, the robot must be able to detect when it is within arms reach of a target item using the dimensions of each arm linkage and distance (including height) from the target. This project can make the shopping process...

MSE
2025-2026
Fall
Winter
Spring Industry Sponsored
Winter
Spring Industry Sponsored
HDAC - High Damping Aluminum Composites
Vacuum robotics used for high-precision chip handling requires materials that minimize vibration and settling time without sacrificing stiffness or compatibility with high-vacuum environments. This project investigates high-damping aluminum-based material solutions for Persimmon Technologies’ robotic arms to improve dynamic performance beyond the current Aluminum 6061 design baseline. Improvements would decrease cycle time, leading to better productivity. Three candidate pathways were evaluated: aluminum metal matrix composites, additively manufactured lattice structures, and cold-spray processing. Cantilever damping tests, tensile testing, three-point bend testing, and scanning electron microscopy were used to compare damping ratio, natural frequency, stiffness, and microstructure across the sample sets. Initial results show that damping behavior depends strongly on microstructure and fabrication route, with cast A356 aluminum alloy outperforming baseline 6061 in damping, while the fly-ash composite underperformed expectations. Ongoing work focuses on identifying the most promising material architecture for maximizing damping while maintaining the mechanical performance required for robotic arm...
BME
2025-2026
Fall
Winter
Spring Industry Sponsored
Winter
Spring Industry Sponsored
Hema Weave
Hema Weave
Weave got you covered.
Electrospun Chitosan Nanofiber Scaffold for Wound Dressing and Hemostatic Applications.
CEE
2025-2026
Winter
Spring Industry Sponsored
Spring Industry Sponsored
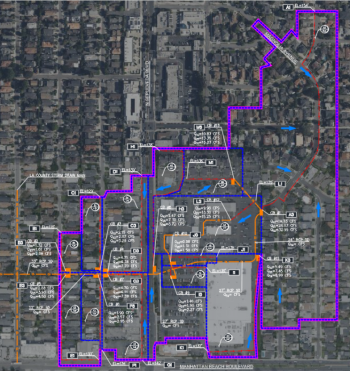
Here's the Catch
A hydrology study is performed in accordance with the Los Angeles County Hydrology Manual Standards for the hydraulic analysis of the existing catch basin located at 14th & Magnolia in Manhattan Beach, CA. The city has experienced frequent flooding in the area and would like to identify the deficiencies in the storm drain system. The study is to recommend improvements to address the frequent flooding that occurs.
EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
HERMES: Hazardous Environment Reconnaissance and Mapping Exploration System
Disaster situations require a swift and agile response to identify all victims in hazardous environments, but human efforts may be limited due to environmental severity. HERMES is an autonomous robotic system composed of a compact robot and a centralized server that will aid rescue operations. Rather than relying on a static map, the server utilizes behavior trees to drive autonomous decision-making. This framework enables the robot to systematically explore unknown spaces by dynamically balancing thorough area coverage with victim identification. At deployment, the controller synthesizes sensor data to localize the robot, map victim positions, and ensure autonomous, collision-free navigation.

MAE
2025-2026
Winter
Spring Internally Mentored (faculty, staff, TA)
Spring Internally Mentored (faculty, staff, TA)
Heterogeneous Multi-Agent Containment Control : Reviving Turtlebot2 for Escort Mission
The TurtleBot2 was release to the public in 2012 and while capable, outdated software makes them unable to be used for ROS2 research, and although some methods exist to make certain functions possible, there are no readily available examples combining both camera and motor functionality. Our project proves the feasibility of cooperative operation across different robotic platforms and provides a functional foundation for future escort mission research with the TurtleBot2s. With additional sensing and navigation capabilities, the framework we set can be expanded into a more advanced autonomous escort system and greatly benefit issues beyond the university setting.
Our project can influence future teams and graduate students working under our sponsor as well as others currently working with TurtleBot2s. They are now able to build off a functioning physical system of a heterogeneous robot team. Beyond the university environment, our project has potential applications in autonomous escort...

MAE
2025-2026
Winter
Spring Internally Mentored (faculty, staff, TA)
Spring Internally Mentored (faculty, staff, TA)
Heterogeneous Multi-Agent Containment Control System
Our senior design project focuses on the revival and development of a heterogeneous multi-robot containment and escort system utilizing a Hiwonder SpiderPi hexapod robot as the leader and four TurtleBots as the escorts or followers. This project introduces students to coordinated control, real-time communication, and containment logic across the robot team, and in the future could aim to aid real-world applications like automation, surveillance, other laboratories, and possibly the military.
The primary objective of our project is to integrate the SpiderPi and TurtleBot2 platforms using a ROS2 communication framework, enabling the TurtleBots to hold a convex hull escort formation around the SpiderPi as it navigates its environment. This project also aims to achieve our sponsor’s goals of modernizing older versions of her robotic hardware, extending her lab’s capabilities, and providing future students with a framework to grow with the ever-evolving multi-agent robotic research.

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
High Frequency Trading Project
The global financial markets process trillions of dollars daily, making microsecond-level order execution critical for high-frequency trading (HFT) profitability. Standard CPU-based trading engines often struggle with performance bottlenecks due to sequential execution and memory access limitations. This project addresses the need for ultra-low-latency, high-throughput computing to execute large volumes of trades in real time. By overcoming software limitations, the system provides a scalable solution that benefits modern financial institutions and traders relying on speed and reliability. The system utilizes a hybrid hardware-software architecture, employing an FPGA-based Tensor Processing Unit (TPU) to run a lightweight neural network for intelligent order placement. A novel FPGA-based MultiQueue BRAM architecture is used for deterministic, parallel order matching. Meanwhile, the host computer manages over 100,000 orders using lock-free Red-Black Trees for cache-efficient, large-scale storage. The machine learning component leverages a Proximal Policy Optimization (PPO) reinforcement learning agent to dynamically rank trades for caching in...

MSE
2025-2026
Fall
Winter
Spring Industry Sponsored
Winter
Spring Industry Sponsored
High Performance Dental Ceramics Through Additive Manufacturing
Nearly half of all Americans are dissatisfied with the color or appearance of their teeth, yet the path to a confident smile remains lengthy and highly inefficient. Dental veneers offer one of the most effective and straight forward options, with around 8% of Americans opting for veneers. Traditional approaches such as milling are time-consuming, and waste a significant amount of material. Additionally this route requires multiple office visits and additional time for labs to process and produce the final product. For patients with more complex definitions, these timelines can stretch even further putting additional pressure on dentists and suppliers.
This project aims to address this issue by exploring the feasibility of additive manufacturing, specifically DLP, for the production of dental veneers. Rather than cutting/milling down a block of material, DLP builds the part layer by layer, enabling greater geometric precision, reduced material waste, and potential for same...

MAE
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
High Tech Art Exhibit - The Interactive World of Anteaters
The job of an engineer is to solve problems that occur within society whilst minimizing costs and maximizing the efficiency, safety, and applicability of their solutions. Where most other design projects aim to solve quantifiable problems, our project aims to expand engineering by working to solve the growing problem of fleeting creativity and joy through an artistic approach in addition to rigorous engineering analysis. In the digital era, screens and passive consumption dominate our attention, defining a societal need for tangible, interactive experiences that reconnect people with their sense of wonder. The High-Tech Art Exhibit aims to reframe the UC Irvine community's view of engineering as more than sterile technology and profit, instead focusing on the inherent creativity and joy that is deeply embedded within the design process itself.

CEE
2025-2026
Winter
Spring Industry Sponsored
Spring Industry Sponsored
Hillside Land Development Senior Design Project
Our project takes a vacant 3.38-acre hillside parcel at 5800 Carbon Canyon Road in Brea, developing the complete preliminary civil design needed to subdivide it into seven single-family lots. We covered street layout, grading, storm drainage, sewer, and water. The site has sat undeveloped for a reason, however. It carries 40 to 50 feet of elevation change, has a single feasible access point off Carbon Canyon Road, and every street and pipe built on it has to work with that slope.
Parcels like this are increasingly what remains in north Orange County, where housing demand is strong: but flat, easily developed land is gone. The need we are addressing is practical. Our team wants to show that a steep infill site can support a code-compliant, financially realistic subdivision.
The outcome affects future homeowners, the City of Brea, which would...

EECS
2025-2026
Fall
Winter Internally Mentored (faculty, staff, TA)
Winter Internally Mentored (faculty, staff, TA)
HoloPhase
HoloPhase is a projection system designed to render clear images through dynamically changing turbid media such as fog, where Mie scattering would otherwise blur and distort the projected content. Our approach combines computational optics, a Digital Micromirror Device (DMD)– based wavefront shaper, and a camera-in-the-loop optimization pipeline that iteratively updates the projected wavefront to compensate for scattering. By jointly designing the optical setup, fog chamber, and control software, we can recover higher-contrast, sharper images through fog than conventional, uncorrected projection.