Remotely Operated Vehicle - ROV - Team 15A

A.R.C.H.E.L.O.N.
Advanced Remote Controlled Hydrodynamic Explorer of Logistics & Oceanic Navigator
Background
A.R.C.H.E.L.O.N.
Advanced Remote Controlled Hydrodynamic Explorer of Logistics & Oceanic Navigator
Background

Established in 2015 at the University of California Irvine, HyperXite is a team of undergraduate students endeavoring to build a small-scale Hyperloop pod. As such HyperXite requires a vehicle that will allow us to easily transport our 300kg pod to different locations in addition to serving as a workstation to service and assemble the vehicle during the building stages.
Our Goal as a sub-team within HyperXite is to design, build, and test a vehicle that is capable of transporting, lifting, and servicing the pod regardless of our location or equipment on hand.

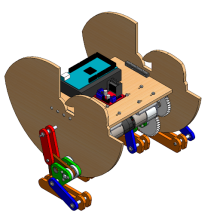
The team nine senior design project has been tasked with designing and building two revisions of a minimally actuated robot walker. In the first half of the project the team was tasked with designing a walker with eight legs, two DC motors, and IR remote control. Upon completion of this revision at the end of the fall quarter, the team changed focus under the direction of Professor McCarthy, the project sponsor. The refined objective shifted to building a new robot walker with four legs, two DC motors, and more complex autonomous control abilities. Robot autonomy was made possible through Arduino control and PixyCam robot vision, enabling line and object tracking. The overall goal of the project was to achieve a robust and high functioning robot with control autonomy in order to further the research conducted by Professor McCarthy and his graduate student Jiaji Li.

Practicing pickleball alone is tedious and ineffective. Current models on the market are too expensive and do not provide essential features for pickleball play/practice. Our project is to design an inexpensive machine that can replicate realistic pickleball trajectories that would be observed in a game. This includes adjustable speed, spin, angle, launch height, and feed rate. Our niche however is a 3-wheel design, allowing our machine to launch pickleball with sidespin, a feature that current models on the market do not have. All parts used to create the machine will either be commercially available or will be replicable using online services.
The project aims at testing the level of relativity between values of airfoil performance from prediction and the one in reality. Through the airfoil analysis tool (XFOIL), the team will simulate a numerical airfoils and obtain the values from the prediction. In the meanwhile, the team should design and manufacture the corresponding airfoils that are valid for wind tunnel test. Finally, the team will compare the results from the two methods and apply Technology Readiness Levels (TRL) to evaluate the conclusion relativity between prediction and reality.

Our project objective is to design and build a vertical lift system to transport a 16 oz plastic water bottle. The bottle must maintain its upright position, from a starting height no greater than 2 inches up to a platform positioned between 8 and 12 inches above the table surface. With the system on a budget of $250, there is an emphasis on the system being simple in design and use. Due to a 10 week design and assembly timeline the design must be easy to manufacture. And an overall goal to have the robot move quickly, reliably, freestanding, automated and battery-powered.

In this project, we are creating a control system, with the end goal of having an autonomous electric bicycle that makes use of the self-stabilizing geometries of two wheeled vehicles. This control system will consist of mostly off the shelf parts, such as a pre-built remote control bicycle, a Raspberry Pi, gyroscopic sensors and compass magnetometer sensors. They will all connect in order to sense the speed, lean angle and position of the bike. With this information, the microcontroller will change the steering angle accordingly to stabilize the bicycle.

Standard home thermal management systems consume a significant amount of energy. This can be costly and contributes greatly to CO2 emissions. Our project aims to test an insulated and airtight structure that maintains comfortable temperatures without heat pumps, boilers, or furnaces.
Ventilation Nation will design a modifiable testbed in order to analyze the effects of changing different physical and functional characteristics of a home and show how models can be used to improve ventilation-only performance. Our goal is to use this testbed as proof of concept for the feasibility of a real-world ventilation-only home thermal management system.
Summary
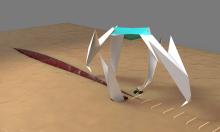
For this project, we aim to design a robot with the ability to fold and maneuver four legs while being equipped with the tools necessary to perform a suture. This device aims to streamline the suturing process by reducing human errors and labor through robotic technology. In the event of an accident, there are many risks and time delays associated with manual treatment during a patient’s access to treatment. Modern medical devices are well equipped to deal with such issues but can be expensive and difficult to access.