
Background:
Robotic walkers are a cutting edge technology that move by the usage of classic mechanics requiring links, gears, shafts, and more. With the progress of next generation AI capability, such as CHATGPT, it is no question that programming AI to complete tasks or commands is possible. Through the usage of code alongside mechanics you can program a mechanical walker to complete simple tasks as simple as following a black line all the way up to complex warehouse tasks. A lack of reliability and simplicity is why these robots are not common, only showcased by companies such as Boston Dynamics. To provide a simple yet reliable control integration, a minimally actuated approach will be taken. Minimally actuated robots use a minimal amount of sensors and actuators to make sure they are less prone to failure and more reliable.
Goals and Objectives:
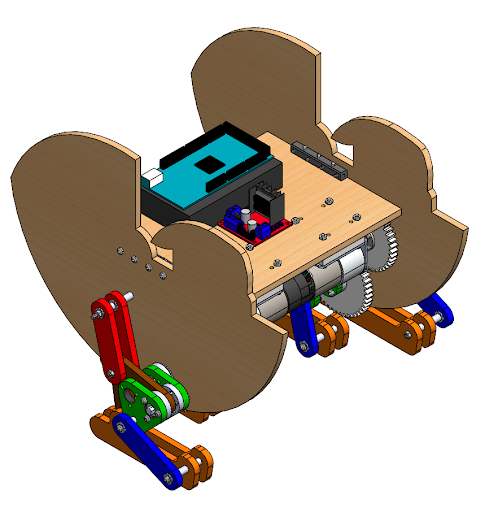
Our winter 2024 Robotic Walker will feature a minimally actuated two-legged design, capable of forwards and backwards movement with a 360° range of turning. We hope to demonstrate a reliable and sturdy chassis capable of all previously stated by the end of winter 2024 quarter. Our objectives are to design and create this robot through tools such as simulation, motion analysis, and additive manufacturing. Through the process we will gain experience of verfication and validation, system integration, and collaboration. By the end spring 2024 quarter, we hope to redesign the walker ,or even create a new walker, to incorporate Rasberry Pi, sensors, and Pixycam to demonstrate a fully autonomous minimally actuated robotic walker.
Engineering Analysis
To make this project happen in 10 weeks, we needed to get the SolidWorks model to know we would not run into any manufacturing errors down the line. To validate our SolidWorks model, a motion analysis was conducted to create a real life simulation. One 50RPM was applied to each side of the robotic walker linkage, gravity and contact points were also considered. Two videos are linked, one considers robotic turning by varying RPMs of individual motors and one considers constant 50RPM on each motor to propel the robot forward.
Team Contact:
Rashad Kayal: rkayal@uci.edu
Braden Polsemen: bpolseme@uci.edu
Richard Arreola: rarreol3@uci.edu
Christopher Garcia: cdgarci4@uci.edu
Sponsor/Advisor:
Dr. J. Michael McCarthy: jmmccart@uci.edu