
The job of an engineer is to solve problems that occur within society whilst minimizing costs and maximizing the efficiency, safety, and applicability of their solutions. Where most other design projects aim to solve quantifiable problems, our project aims to expand engineering by working to solve the growing problem of fleeting creativity and joy through an artistic approach in addition to rigorous engineering analysis. In the digital era, screens and passive consumption dominate our attention, defining a societal need for tangible, interactive experiences that reconnect people with their sense of wonder. The High-Tech Art Exhibit aims to reframe the UC Irvine community's view of engineering as more than sterile technology and profit, instead focusing on the inherent creativity and joy that is deeply embedded within the design process itself.
The capstone projects in the Department of Mechanical and Aerospace Engineering is run by "faculty member name". Need to add more content specific to MAE.

High Tech Art Exhibit - The Interactive World of Anteaters

Hybrid Mechanical Energy Storage
Background and Project Scope
The Problem
Modern electrical grids face a fundamental challenge: energy supply and demand rarely align. Renewable energy sources such as solar and wind are inherently intermittent, generating power when conditions allow rather than when consumers often need it. To bridge this gap, grid operators, remote facilities, and industrial users depend on energy storage systems that can absorb excess supply and release it on demand, a practice known as electrical load shifting.
Today, electrochemical batteries dominate this market. While effective, they carry significant drawbacks that limit their suitability in certain contexts: they degrade with each charge cycle, rely on toxic and expensive materials, present fire and chemical hazard risks, and impose ongoing replacement and disposal costs. For long-duration or emergency storage applications, these limitations are critical failures.
The Need
There is a clear need for an...
Hybrid Mechanical Energy Storage
The Problem
Renewable energy sources like wind and solar generate electricity intermittently, often producing excess energy when demand is low and falling short when demand peaks. Today, the dominant solution for bridging that gap is electrochemical batteries. While effective, batteries carry significant drawbacks: they rely on resource-intensive mining of lithium, cobalt, and other minerals, degrade over time, pose environmental disposal challenges, and can be prohibitively expensive at scale.
Our Approach
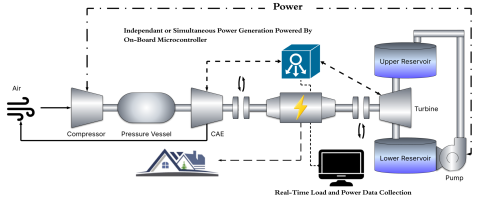
PetrChu is a benchtop-scale hybrid mechanical energy storage system that demonstrates an alternative. The system combines two well-established storage methods into a single integrated platform:
-
Compressed Air Energy Storage (CAES)
-
Air is compressed into a pressure vessel during periods of excess energy. When power is needed, the stored air drives a reciprocating piston engine connected to an alternator.
-
Pumped Hydro Storage
...
HydraShift - RC Boat to Submarine
RC boats are widely commercially available, while RC submarines remain a costly, niche product. Therefore, the objective of this project is to transform an off-the-shelf 1:18 scale RC boat into a submersible submarine capable of underwater and surface maneuverability, and can dive to a depth of at least three meters before reliably resurfacing. Some goals in this include developing a ballast system to resist hydrostatic pressure and achieve buoyancy, sealing electronics to ensure waterproofing at high depths, and underwater propulsion.

Key Vending Machine
The UCI engineering facilities and students rely on a large number of room keys including things for labs, workshops, and specialized project spaces. Currently, key distribution is handled manually by staff members who must approve requests, check out keys, and track returns. This process is often slow, inefficient, and difficult to keep organized. A more efficient and automated solution is needed to streamline the key checkout and return system, reduce staff workload, and improve overall organization. This project addresses this need by developing an automated key vending machine that securely stores and dispenses keys through a digital request and approval system, improving accessibility, efficiency, and trackability for all students, staff, and faculty who rely on these facilities.
KIWI Logistics: Autonomous Warehouse Robot
Kiwi Logistics aims to design and build an autonomous warehouse robot capable of navigating a structured indoor environment, detecting obstacles, and operating within an inventory management workflow. Current warehouse operations depend significantly on extensive physical labor to lift and transport inventory, often leading to a high risk of workplace injury or long-term health problems. The goal of our design is to present a scalable, easy-to-use autonomous inventory management system that tackles the risk of manual labor without eliminating human jobs in warehouse operations.
KIWI Logistics: Autonomous Warehouse Robot
Kiwi Logistics aims to design and build an autonomous warehouse robot capable of navigating a structured indoor environment, detecting obstacles, and operating within an inventory management workflow. Current warehouse operations depend significantly on extensive physical labor to lift and transport inventory, often leading to a high risk of workplace injury or long-term health problems. The goal of our design is to present a scalable, easy-to-use autonomous inventory management system that tackles the risk of manual labor without eliminating human jobs in warehouse operation.

MAE 151B: E-SONIC Bubble Box
Bubble Box is an interactive musical instrument that turns visible fluid motion into sound. The project was developed for the E-SONIC new instrument competition, where engineering design is used to create original instruments that are playable, expressive, and visually engaging. Bubble Box addresses the challenge of making a fluid-based instrument that is not only interesting to watch, but also repeatable enough for a performer to control during a live demonstration.
The final design uses water pulses to generate vortex rings inside a transparent chamber. These vortex rings travel through the water and perturb a flexible membrane connected to a sensor. The sensor signal is processed by an Arduino-based electronics system and converted into musical notes. The result is an instrument where the performer can “play” vortex rings, creating a direct connection between fluid motion, visual rhythm, and sound.

Mag-Vengers
Mag‑Vengers is a senior design project in collaboration with a local defense company that focuses on remote data collection at impacted areas using drones. The team aims to advancing drone functionality through the use of electropermanent magnets and has developed a lightweight, durable drone attachment system embedded with EPMs to create a strong, switchable magnetic latch. Controlled electronically, the latch can be turned “on” or “off” to securely hold and individually release six (or more) sensor pucks during high‑speed flight.
The project’s goal is to deliver a fully functional prototype that is reliable, aesthetically clean, and easy to modify for future teams or organizations. Through the utilization of EPMs, the team aims to reduce size, weight, and power (SWaP) requirements. Over the course of two academic quarters, the team has applied skills in CAD modeling, simulation, prototyping, and documentation to design, test, and refine the system. Milestones...
Microfluidic Cell Engineering Platform: Spring 2026
The BioMiNT Lab at UC Irvine has developed a microfluidic platform that uses AESOP technology to deliver genetic material into cells, which engineers them to fight diseases like cancer. Ex vivo cell and gene therapy has the potential to save lives. Despite having a successful prototype, the problem is that the platform is currently made from Polydimethylsiloxane (PDMS), a silicone polymer that has an operation time of 10 minutes and cannot be mass-produced quickly or at a low cost. In addition, FlexDym, another industry-standard material in biomedical engineering, has been used and is faster than PDMS, but it comes at a higher cost. Team FloBoss’s objective is to transition this platform from PDMS and FlexDym to the Polypolypropylene thermoplastic. This material extends the operation time, increasing the throughput, lowering manufacturing costs, and enabling large-scale production. In addition, new designs by Team FloBoss are creating higher throughputs and extending the...
Microfluidic Cell Engineering Platform: Winter 2026
The BioMiNT Lab at UC Irvine has developed a microfluidic platform that uses AESOP technology to deliver genetic material into cells, which engineers them to fight diseases like cancer. Ex vivo cell and gene therapy has the potential to save lives. Despite having a successful prototype, the problem is that the platform is currently made from Polydimethylsiloxane (PDMS), a silicone polymer that only lasts about ten minutes during operation and cannot be mass-produced quickly or at a low cost. Team FloBoss’s objective is to transition this platform to one of the following thermoplastic materials: Flexdym, Polystyrene (PS), and Polymethyl Methacrylate (PMMA). These materials will extend the operation time, increasing the throughput, lowering manufacturing costs, and enabling large-scale production. Scaling up this technology allows cell-based therapies to be more accessible to hospitals, medical professionals, and the patients who need this care the most.

Multiport Emissions Sampling Probe
The Multi-Port Exhaust Emissions Sampling Probe was built to improve the accuracy and versatility of exhaust gas sampling in H₂–NG combustion testing. It has multiple independently controlled sampling ports so that emissions can be sampled at various positions within the exhaust stream without having to move the probe. The design uses modular fittings (Swagelok), which allow the system to be easily assembled or disassembled and to be scaled up to accommodate different experimental test rigs. Each port is attached to a solenoid valve system that is controlled by an Arduino and DAQ interface to automatically switch between sampling positions. The probe is also able to be moved in three dimensions to provide complete coverage of the measurement area and to allow for adaptation to different combustor geometries. This system is more efficient and repeatable and has higher spatial resolution than previous systems for emissions diagnostics. It will serve as...
Narcotic Network: Autonomous Medical Delivery Drone
Narcotic Network aimed to design a lightweight device that provides quick and accurate medication delivery to patients living within 0.5 km of a pharmacy. Although Amazon Prime and FedEx Overnight offer one-day delivery, current commercial methods remain costly, inconsistent, and impersonal, especially outside urban areas. Therefore, underserved patients in suburban and exurban regions need novel medical delivery methods. The Narcotic Network Autonomous Delivery Drone, a 1.9 kg quadcopter, autonomously carries up to 0.5 kg of medication of various forms to patients who are unable to leave their homes. By transporting medication directly from pharmacies to elderly and terminal patients who need frequent medication refills, Narcotic Network enhances the customer experience by ensuring personalized, prompt delivery of high-priority medicine.

Orthon - Dynamic Insole with Pressure Offloading for Gait Optimization
ORTHON’s purpose is to create a proof of concept for a dynamic orthotic system capable of treating severe foot conditions that concern painful flat foot and ulcer prone diabetic foot issues. This dynamic orthotic looks like a wearable shoe insert that can detect pressure and/or temperature in order to react with the necessary support for the user’s foot. For such conditions, the current medical orthotic solution is a rigid, static shoe insert originally invented in the 1950s. Meanwhile, the human foot is one of the most dynamic mechanical structures in the body with 33 joints and 26 bones. Although they may be clinically effective, many users find their rigid inserts to be uncomfortable, discontinuing the prescribed use and resulting in surgery.
20% of the world's population have some degree of flat feet, which essentially means that the medial arch in their foot is less than 10mm off...
ORTHON- A Dynamic Orthotic Device
ORTHON’s purpose is to create a proof of concept for a dynamic orthotic system capable of treating severe foot conditions that concern painful flat foot and ulcer prone diabetic foot issues. This dynamic orthotic looks like a wearable shoe insert that can detect pressure and/or temperature in order to react with the necessary support for the user’s foot. For such conditions, the current medical orthotic solution is a rigid, static shoe insert originally invented in the 1950s. Meanwhile, the human foot is one of the most dynamic mechanical structures in the body with 33 joints and 26 bones. Although they may be clinically effective, many users find their rigid inserts to be uncomfortable, discontinuing the prescribed use and resulting in surgery. As for those with diabetic neuropathy, there is currently no prevention options only devices that are applied to the wound after they occur, an example of this is...
PeterBot - Autonomous 4-Legged Walking Robot
PeterBot is an autonomous walking robot developed by MAE 151 Team 7 under the sponsorship of Professor J. Michael McCarthy. Building upon Professor McCarthy’s MAE 183 mechanical walker design, this project focuses on transforming the existing walking platform into an intelligent system capable of autonomous navigation. The project’s main challenge is reliably integrating the electronics to control stiff geared mechanisms.
This work is relevant to students, researchers and roboticists interested in implementing autonomous mobility on unconventional non-wheeled platforms. By developing PeterBot, Team 7 created a foundation for future students to create autonomous walking robots that can complete higher-leveled tasks.
Portable Ankle Measuring Proprioceptive Device (PAMPD)
"Proprioception," often described as the human body's "6th sense," describes one's ability to know where their body is relative to itself without additional sensation. Proprioception has been proven to be a powerful predictor of the effectiveness of physical therapy, and further, that it is a trainable attribute. For patients recovering from strokes, measuring and training proprioception is a powerful new supplementary tool to use on the road to recovery. While there is one device (the Ankle Measuring Proprioceptive Device) capable of assessing and quantifying ankle proprioception, it is large and difficult to transport, preventing clinical viability. Prospective benefactors and/or test subjects are forced to come to where the device is located to assess and research ankle proprioception. The Portable Ankle Measuring Proprioceptive Device (PAMPD) is a smaller, lighter medical device meant to be brought to clinics to train and assess a patient’s ankle proprioception.
Project 9B: The Anteatairs
A tiltrotor tri-coptor VTOL fixed-wing UAV engineered for search-and-rescue — currently undergoing airframe surface coating and final systems integration before flight testing.
The Mission
Modern search and rescue (SAR) operations face a critical tradeoff: ground teams are slow, and conventional fixed-wing aircraft require runway infrastructure that doesn't exist in disaster zones or remote terrain.
The Anteatairs solves this by engineering a tiltrotor VTOL UAV — a hybrid platform that takes off and lands vertically like a multirotor, then physically rotates its motors forward to transition into efficient fixed-wing cruise flight. No runway. No infrastructure dependency.
Built on a COTS fixed-wing airframe retrofitted with custom tiltrotor propulsion, with a scale fuselage modeled in Fusion 360, a purpose-designed payload delivery bay, FPV telemetry, and autonomous navigation — this platform is designed to rapidly deploy, survey large search areas, and deliver emergency first-aid supplies to...
Rocker-Bogie Stair Climber
Stairways are a fundamental barrier for autonomous ground vehicles. While wheeled robots excel on flat terrain, navigating multi-step staircases remains one of the most mechanically demanding challenges in mobile robotics. Team 28 set out to address this by designing and building a fully autonomous, six-wheeled stair-climbing robot capable of carrying a payload up the 19-step Engineering Gateway staircase at UC Irvine.
Our design utilizes the rocker-bogie suspension system, which is a solution first developed by NASA for their Mars Sojourner rover to maintain continuous wheel contact across uneven surfaces without the need for active stabilization. The project was driven by a practical need: demonstrating that a compact, low-cost ground vehicle can reliably navigate real-world stair environments, with potential applications in search and rescue, building inspection, and last-mile delivery in infrastructure-limited settings.

SmartSweat - Lactate Sweat Analyte Band
According to an article by the American Chemical Society:
"Sports physiology will likely benefit from a technology able to account for high-resolution temporal lactate changes according to the intensity of the physical activity, rather than discrete information from centralized lab-based analysis.”
Lactate is a byproduct of muscular metabolism and an indicator of workout intensity. This market gap exists due to the difficulty in isolating and measuring specific chemicals in sweat, such as lactate. Currently, lactate sensors on the market are usually invasive and require lab analysis. This leaves a large market gap for non-invasive, real time lactate sensors, among athletes as well as the average consumer.
SmartSweat proposes an electrochemical lactate sensor working in combination with a mobile app to provide real-time lactate analysis on the user's sweat.

Stair Climber Robot Final Prototype
Stairs remain one of the biggest obstacles for mobile robots, limiting their usefulness in real world environments. While robots excel on flat surfaces, they struggle with the vertical challenge of staircases. Our project addresses this problem by designing a robot capable of quickly and reliably climbing the Engineering Gateway stairs at UC Irvine while transporting a standard 0.5L water bottle. The core challenge is balancing torque, traction, weight, and stability to achieve a controlled ascent without flipping or stalling. This matters because first responders need robots that can access upper floors in collapsed buildings. Delivery companies need robots that can reach front doors beyond ground level. Individuals with mobility impairments could benefit from assistive devices that navigate stairs in their own homes. Our specific task of climbing the Engineering Gateway stairs with a water bottle serves as a testbed for these broader applications. The problem we are tackling affects...

StairForce One
Current delivery devices and services are optimized for flat terrain and struggle with stair-like obstacles. StairForce One is a remotely operated tracked vehicle designed to transport small payloads up steep staircases without physical tethering. The system uses a dual-track drivetrain and distributed wheel and distributed gear support to maintain stability and traction while climbing. StairForce One successfully transported a 0.5 L (16.9 oz) water bottle up UCI Engineering Gateway stairway in less than 30 seconds with 50% power, demonstrating reliable ascent and remote operation. This project highlights the potential for compact stair-climbing vehicles in last-mile delivery, accessibility support, and emergency logistics.
SubSurface Systems: RC Submarine
Most commercially available 1:18 scale RC boats are designed solely for surface operation, lacking the structural integrity, waterproofing, and buoyancy control needed for submersion. While RC submarines are available as niche hobbyist products, they tend to be expensive, specialized, and limited in depth capability. This project aims to bridge that gap by converting an off-the-shelf RC boat into a functional submarine, applying engineering principles to address challenges in waterproofing, ballast design, and underwater propulsion.
The Anteatairs
A tiltrotor VTOL fixed-wing UAV engineered for search-and-rescue — currently undergoing airframe surface coating and final systems integration before flight testing.
The Mission
Modern search and rescue (SAR) operations face a critical tradeoff: ground teams are slow, and conventional fixed-wing aircraft require runway infrastructure that doesn't exist in disaster zones or remote terrain.
The Anteatairs solves this by engineering a tiltrotor VTOL UAV — a hybrid platform that takes off and lands vertically like a multirotor, then physically rotates its motors forward to transition into efficient fixed-wing cruise flight. No runway. No infrastructure dependency.
Built on a COTS fixed-wing airframe retrofitted with custom tiltrotor propulsion, with a scale fuselage modeled in Fusion 360, a purpose-designed payload delivery bay, FPV telemetry, and autonomous navigation — this platform is designed to rapidly deploy, survey large search areas, and deliver emergency first-aid supplies to survivors....

The BOOM Squad - Toy Ball Cannon
The Toy Ball Cannon Project is a mechatronics-focused design that redefines recreational fun. The system launches lightweight projectiles using flywheel technology while coupling RGB-oriented object detection and navigation to track fast-moving targets. This project heavily involves collaborative design, research, prototyping, performance optimization, safety considerations, and extensive testing, allowing us to apply critical engineering principles in a dynamic way to meet our stakeholder needs and expectations.
Inspired by the Nerf Rival Nemesis blaster, our team aimed to create an autonomous turret that sprays a volley of balls to hit a moving target a minimum of one time per firing cycle.