
Team 33 is developing a new rear suspension system for UCI’s Formula SAE electric racecar that improves handling, adjustability, and manufacturability.
EECS
2019-2020
Fall
Winter
Winter
Auto Tracking and Following vehicle
There are cars could follow traffic or maintain in the lane and keep distance. We wish to design a module, that allow our vehicle to follow a target object in complex situation where there are interference from non-targeting objects. This module could then be implemented to other vehicles platforms such as drones.

MAE
2018-2019
Fall
Automated Single Slot Tester
Background
Astronics Test Systems has developed a semiconductor test system, the Single Slot Tester (SST), to meet the demand of low throughput test systems in industry. The current SST requires a technician to individually place DUT’s (Device Under Test) into the BIB (Burn In Board) and remove after testing is completed.
Goal and Objectives
The goal of this project is to integrate Astronic’s existing SST with a FANUC six axis robot to fully automate the testing process.
Contacts
Faculty Advisors:
Dr. Farzad Ahmadknanlou - farzad.a@uci.edu
Dr. Vince Mcdonell - vgmcdone@uci.edu
Student Contact:
Jose Pereida - jpereida@uci.edu
MAE
2021-2022
Fall
DBF 189 Capstone
This is the payload subteam of the AIAA Design Build Fly Team at UCI. Our subteam is in charge of designing the fuselage to hold vaccine syringes and the drop mechanism to release the syringes. Our goal is to release syringes carefully and quickly to deliver as many syringes as possible without compromising the integrity.
Our team’s goal is to design and build a bomber style aircraft that will instead be used to release vaccine syringes. The payload subteam will be in charge of designing the fuselage to hold syringes and a drop mechanism to individually release syringes. We will strive to release the vaccine syringes as quickly and as safely as possible.

MAE
2025-2026
Fall
Winter
Winter
DialiTEAM
Our project’s goal is to read the hematocrit value in blood using optics, otherwise known as a hematocrit sensor. This device is made to be integrated onto our sponsor’s (Diality) machine and will allow them to read a patient's blood volume rate. Critical design features of the device include: the accuracy of sensing hematocrit; the handling of hazardous material; and the usability of the machine by physicians and at-home caregivers. Stakeholders, including Dialysis Clinic, Technicians, Patients, Caregivers, Dialysis Field Service Technicians, and physicians/Nephrologists.

MAE
2022-2023
Winter
EDI Whoopy Wipes
Whoopy Wipes is a sanitization device capable of dispensing warm, moist towelettes at the touch of a button.

MAE
2019-2020
Fall
EDI: Waste to Energy
Background
Since 1997, the Kyoto Protocol was implemented to set regulations on GHG emissions through Carbon Credits. As a result, we are tasked with the reduction of CO2 emissions and creating an algorithm to find the best possible solution.
-
The company operates a process that generates a waste gas stream with the high calorific value which is currently flared off in an afterburner /air pollution control device.
-
The process is the largest contributor to GHG emissions at the Company. The Company has committed to reducing its GHG emissions by 25% by 2025 but would like to exceed this target.
-
The company is interested in investigating methods to beneficially use this waste gas stream as an energy source.
Goal
The overall goal of this project is to design a thermodynamic power process that runs on the flue gas stream. Operating this power...
CEE
2018-2019
Fall
Express Car Wash Site Design and Traffic Impact Analysis
Project Description:
The FAB 4 and RK Engineering will collaborate to study trip generation rates, queuing and vacuum/parking area counts at various express car washes locations in Orange County. With the gathered data, The FAB 4 will design and prepare a conceptual site plan for a new express car wash in Santa Ana. Factors in consideration included project size, zoning, queuing/parking demand. Finally, a Traffic Impact Study (TIS) will be prepared to evaluate the impacts of the project.
CEE
2018-2019
Fall
FALL 2018: Orchard Hills Land Development
Orchard Hills is a land development project that aims to deliver innovative lifestyles while meeting the demands of the surrounding communities it serves. Located in northern Irvine, bounded by roads 133, 261 and 241, this region conserves wildlife while actively facilitating space for the existing agargian economy. Free veteran housing was a continual priority throughout design based off the sociocultural climate of Irvine. Key elements found in this planning area include sustainable roadway design aimed at integrating autonomous vehicles with bicycle paths, emergence of a solar powered cable car as a reliable method of transportation, and a vibrant commercial section that will benefit Orange County.
CEE
2018-2019
Fall
FALL 2018: Orchard Hills Senior Housing and Recreational District
In light of UC Irvine’s status as a leading university in eco-friendliness, LLPH Development aims to develop a space that will serve as a green space, or “suburban oasis”, to the City of Irvine. The space will provide residents a pleasant travel destination minutes away from their homes. Our focus is to harness clean sources of energy and minimize our carbon footprint.
LLPH highly considers the importance of the environment as well as a strong sense of community in an effort to represent our company’s slogan: “Practical. Obtainable. Sustainable.” We are inspired by our core beliefs and will provide residents and visitors of Irvine an innovative and extraordinary yet cost-effective design.
CEE
2018-2019
Fall
FALL 2018: Site Developing Plan: Irvine Planning Area 1
The City of Irvine is looking for proposals to develop Planning Area 1 (PA1). LCC inc. has developed a land development project proposal for the 3911-acre land and is planning on developing PA1 by adding recreational activities that attract the local and international community. The recreational plan includes an anime theme park, a hiking trail, and a downtown area.
CEE
2018-2019
Fall
FALL 2018: Site Development Plan for PA 1 - Tierra Engineering Group
The City of Irvine has sent bids for future project plans for Planning Area One, located in the northeast corner of Irvine. Planning Area One is 3,625 acre area of undeveloped lands and can provide the city potential economic growth. Tierra Engineering Group is composed of 4 members with many differernt area of expertise. Moreover, Tierra Engineering Group designed a conceptual development that include an amusement park and Asian focused commercial area. Our goal as a company is to provide the City of Irvine, a technology driven and multicultural community that stimulates the interest of residents and potential vistors to boost the Irvine's local economy.
CEE
2018-2019
Fall
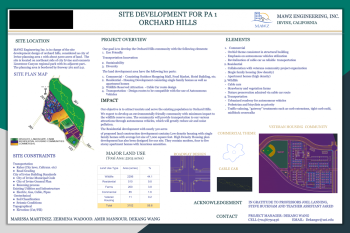
FALL 2018: Site Development Plan for PA1
The project proposes a new development in Planning Area 1 in the City of Irvine, CA. The approximately 4200 acre lot will be established into a mixed-use development consisting of commercial, industrial, and agricultural. The main aspects of the development will focus around a vineyard and estates. The estates will provide the residents with a high quality of living and will be tailored to wine enthusiasts. Attractions, such as, hot air balloon, a museum, winery will be implemented onto the site boosting the economy and creating a space for recreation.
CEE
2018-2019
Fall
FALL 2018: Site Development Plan for PA1
MRC Engineering wants to share their plans for Orchard Hills development in Irvine, California! Irvine is known as a safe quite city with a few destinations for entertainment. MRC Engineering wants to bring LA life to the beautiful city of Irvine. The firm proposes to design an observatory, museum, concert hall, and hotels surrounded by commercial property!
CEE
2018-2019
Fall
FALL 2018: Site Development Plan for Planning Area 1 - Orchard Hills Development
Our firm, RPM & Associates has been given the opportunity to develop Planning Area 1, also known as Orchard Hills. Our team plans to follow the City of Irvine's general plan and create a development to improve economic prosperity, ensure safety, and ultimately improve the quality of life for all its residents. A main component of this development will be the Multi-Use Event Center (Stadium) which will be created to host events and major sporting events. Along with the event center, we strive to encourage the use of public transit to limit the number of vehicles on the roads during peak periods.
The project is split into three phases. The three phases are Project Planning, Project Design, and Project Construction. This project requires research and planning to ensure the development complies with all of the restrictions, design codes, and constraints. Then the actual design for community layouts, infrastructure components, and event stadium...

MAE
2021-2022
Fall
Winter
Winter
Fastener-less Flange
Relativity Space has partnered with UCI to create a senior design project set to redesign the flange. With bolted flanges currently being the primary method of reversable attachment of two pipes it’s simple design and out of date manufacturing process has left much room for improvement. We have set forth to design, test and manufacture a prototype flange that is 3D printed, light weight, and maintains ASME flange standards.

MAE
2025-2026
Fall
Winter
Winter
Fuel Blending Systems Control and Demonstration
The Fuel Blending System Control and Demonstration project focuses on modernizing and integrating advanced control and data acquisition technologies for the UCI Combustion Lab’s fuel mixing system. This system supports testing on multiple end-use devices, including gas turbines, fuel cells, and other combustion systems, which are being adapted for operation on low-carbon fuels such as hydrogen and biogas. The project involves reviewing existing system components, developing a comprehensive bill of materials (BOM) for upgraded hardware and software (e.g., LabView, Python, or MATLAB-based control), and ensuring full system compatibility. Once the updated components are procured, the team will integrate and demonstrate the system’s performance on one or more devices. The project aims to enhance flexibility, reliability, and data quality in fuel blending operations, supporting ongoing research in hydrogen and low-carbon fuel applications.

MAE
2019-2020
Fall
Fuel Cell Battery
Background
Flow field bipolar plate is a very important part of the proton-exchange membrane fuel cell(PEM). They are designed to provide an adequate amount of the reactants (hydrogen and oxygen) to the gas diffusion layer (GDL) and catalyst surface meanwhile remove the generated water. In general, the flow field is grooved in bipolar plates featured by hollow channels with a cross-section dimension of ~1 mm. Using hollow channels increases the thermal resistance and electric resistance in the fuel cell, thereby reducing cell performance. In this project, we plan to design a proton-exchange membrane fuel cell using porous media flow field, which fills channel space by porous media. We will investigate fuel cell performance and flow conductance for this new flow field design. The porous media selection will be optimized, in terms of parameters including porosity, tortuosity, pore size, and mechanical properties, for high-performance fuel cells.
Goals and objectives
Our goal...

MAE
2020-2021
Spring
FUSION Robot Pupper: Team Hachiko
This project was to make a robotic quadruped in the form of a dog. It should be able to be voice-controlled using recognized commands to move via servo-controlled leg joints as well as perform speech output. To achieve this, we utilized 3-D printed material for the chassis and legs as well as bearings for structural support. These parts hold a “Raspberry Pi 4” connected to a servo hat that leads to 12 different servos, three for each leg. As far as software, we imported a voice recognition library, taking advantage of Google’s voice recognition taking input from a USB microphone and outputting from a speaker.
CEE
2018-2019
Fall
Hesperia Lift Station Design
Pure Vision is working along with engineers at HDR, to design a lift station in the city of Hesperia in order to divert flow to the regional wastewater treatment plant. This project will benefit the residents of Hesperia. The lift station will be located in the middle of a residential area and will be surrounded by tall walls with an odor control system favorable to the residents in the community. This system will receive 1 MGD of wastewater from the new local neighborhood that will be diverted to the regional wastewater facility. The manhole where this diversion will occur will be 1000 ft from the location of the lift station. The goal is to design a gravity pipe, a lift station, a force main, and odor control system that meets these design constraints. The lift station will be designed with one pump and one additional pump for redundancy and a designed...
MAE
2018-2019
Fall
High Heat Flux Thermal Management
MAE

BME
2020-2021
Fall
Hoag Bone Plate Fixation Project
The Hoag Bone Plate Fixation Project is a design project sponsored by Hoag Orthopedics consisting of MAE/BME/MSE students that are tasked to identify geometry and material for orthopedic plates that provides imporved fracture fixation. By improving the frictional interface of the bone-plate surface, the re-designed plates hope to reduce shearing and micromotion of plates, and in term decrease the cases of failed fracture fixations in patients.

BME
2020-2021
Winter
Hoag Bone Plate Fixation Project
The Hoag Bone Plate Fixation Project is a design project sponsored by Hoag Orthopedics consisting of MAE/BME/MSE students. The purpose of the project is to improve the overall design of the current bone plate which is an smooth metal plate implant held together by surgical screws used to immobilize fractured bone segments. A textured bone plate should provide more friction between the bone and the plate. The screws in both the smooth bone plate and the textured bone plate are compared which will be used to determine if increased friction between the plate and the bone reduces failure of the screws. The re-designed plates hope to reduce failure in the screws which will decrease the number of failed fixations in patients.
MAE
2023-2024
Fall
Winter
Spring
Winter
Spring
Human Powered Vehicle Challenge (HPVC)
sdfd