Auto Tracking and Following vehicle
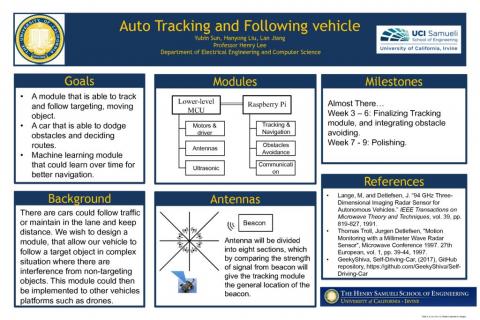
There are cars could follow traffic or maintain in the lane and keep distance. We wish to design a module, that allow our vehicle to follow a target object in complex situation where there are interference from non-targeting objects. This module could then be implemented to other vehicles platforms such as drones.
Project status:
Archived
Department:
EECS
Term:
Fall
Winter
Academic year:
2019-2020
Winter Poster: