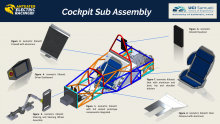
The Driver Cockpit Subsystem focuses on improving driver comfort, control, and safety in Kilozott, Anteater Electric Racing's newest car for the 2024-2025 season. The project includes the design, CAD modeling, and manufacturing of the seat, headrest, firewall, and steering system.
Testing revealed wrist strain from steering angles, inadequate lateral seat support, and inconsistent pedal resistance. To address these, the team is refining seat bolsters, steering ergonomics, and pedal feedback while ensuring seamless chassis integration.
Key improvements include a redesigned seat with extended bolsters, an optimized steering position, and an adjusted firewall for better helmet clearance. The team will finalize the prototype based on driver feedback and conduct static and dynamic testing before competition.