
3D Mapping Drone System
2025-2026 - Fall, Winter
This project focuses on developing an autonomous drone system capable of real-time 3D mapping and environmental perception. Traditional inspection and mapping processes are often time-consuming, labor-intensive, and unsafe in complex environments such as construction sites or disaster areas. Our system addresses this problem by integrating onboard sensing and computing to enable automated data collection and mapping. This project is relevant to industries such as infrastructure inspection, search and rescue, and environmental monitoring, where efficient and safe data acquisition is critical.

3D Printed Microscope Using AI/ML Image Recognition for Automated Cell Counting
2025-2026 - Fall, Winter
Cell counting within cell biology labs is a tedious process that is done manually. The 3D-printed microscope using AI/ML Image Recognition provides a cost-effective and efficient solution that streamlines this process. The 3D-printed open-source microscope is affordable and intuitive to use for capturing images of cells. When used in tandem with open-source artificial intelligence cell counting software, biology labs can now effectively count cells at a fraction of the time it takes to count these cells by hand.
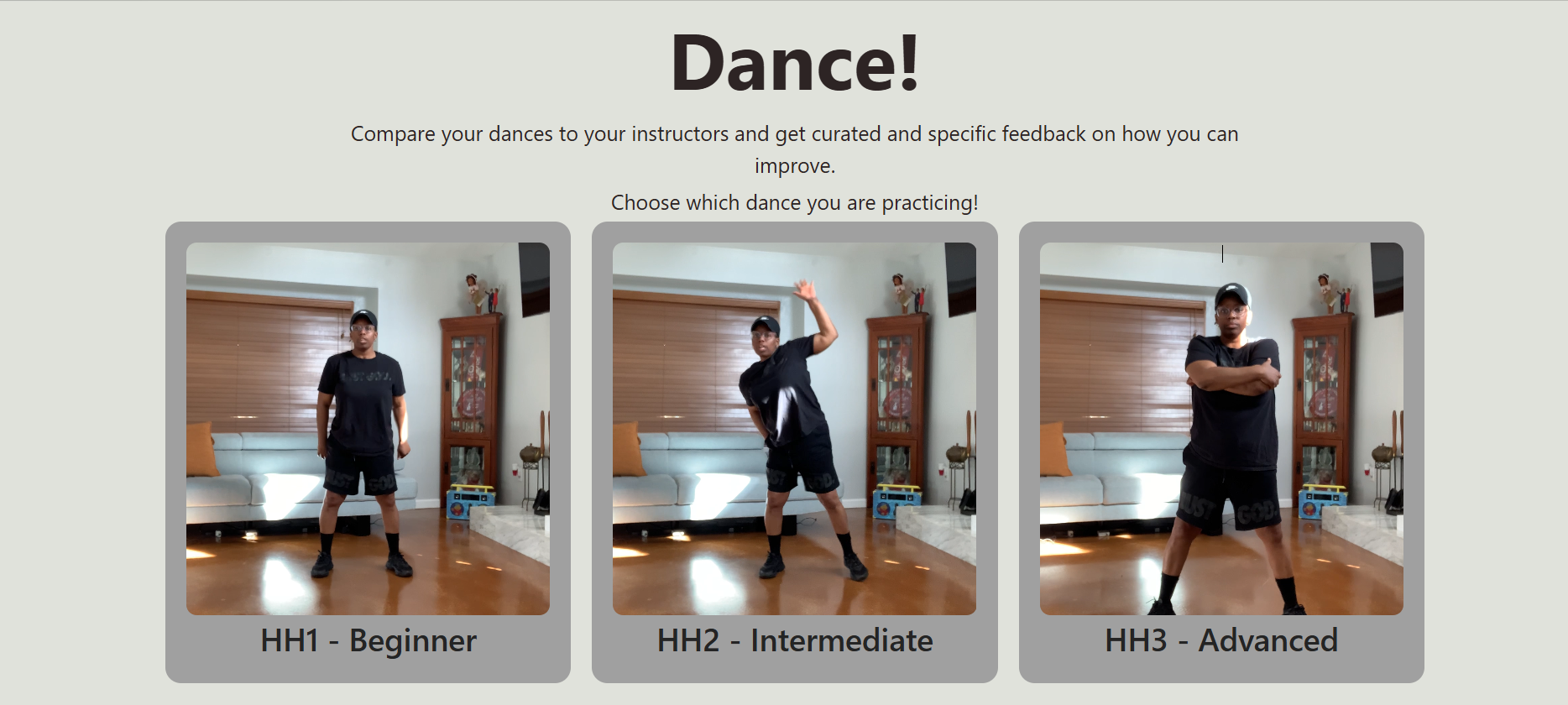
3Dance
2025-2026 - Fall, Winter
3Dance is a tool designed to help users safely learn and practice dance by comparing their movements to instructor videos in real time. Using OpenPose pose estimation, it tracks body key points and provides accuracy feedback, achieving about 3% error compared to human instructors while operating at up to twice the original video speed. The system also delivers real-time feedback at 10–30 fps, making it practical for live practice. Developed as part of a 2025 academic project, it focuses on providing accessible, real-time dance training through motion analysis.

AeroMed Quadcopter
2025-2026 - Fall, Winter
Urban traffic and traditional delivery methods often delay the arrival of critical medications, especially during peak hours. Currently, pharmaceutical logistics rely on pollutant-emitting vehicles that group multiple orders together, leading to slow delivery times and unnecessary human contact. There is a clear need for a faster, greener, and more isolated delivery method to ensure patients receive 1lb payloads safely and efficiently.
This project addresses these issues by developing an autonomous drone capable of delivering medical supplies directly to a client’s landing pad. By using aerial navigation, the system bypasses road congestion, reduces transportation costs, and eliminates tailpipe emissions. This matters because it provides a reliable, "no-contact" service that is essential for time-sensitive healthcare.
The project directly benefits pharmacists, delivery operators, and local businesses by streamlining their distribution. Most importantly, it supports homebound or disabled clients who require secure, direct access to medication. It also considers the public and...
AI-Enabled Automated Greenhouse System Using Raspberry Pi and Predictive Environmental Modeling
2025-2026 - Fall, Winter
This project addresses the challenge of maintaining healthy greenhouse conditions without constant manual monitoring and intervention. Our team developed an AI-enabled automated greenhouse system that monitors soil moisture, temperature, and humidity, then automatically regulates irrigation and lighting to support plant growth. The project matters because it demonstrates how embedded systems, IoT devices, and machine learning can make plant care more efficient, consistent, and scalable. By reducing unnecessary watering and improving environmental stability, the system supports smarter and more sustainable small-scale agriculture. For more information, please access our Final Project Report: https://drive.google.com/file/d/1TOLH5HtbCEyqZn1P6OdofzXTeMpmVzWa/view?u...
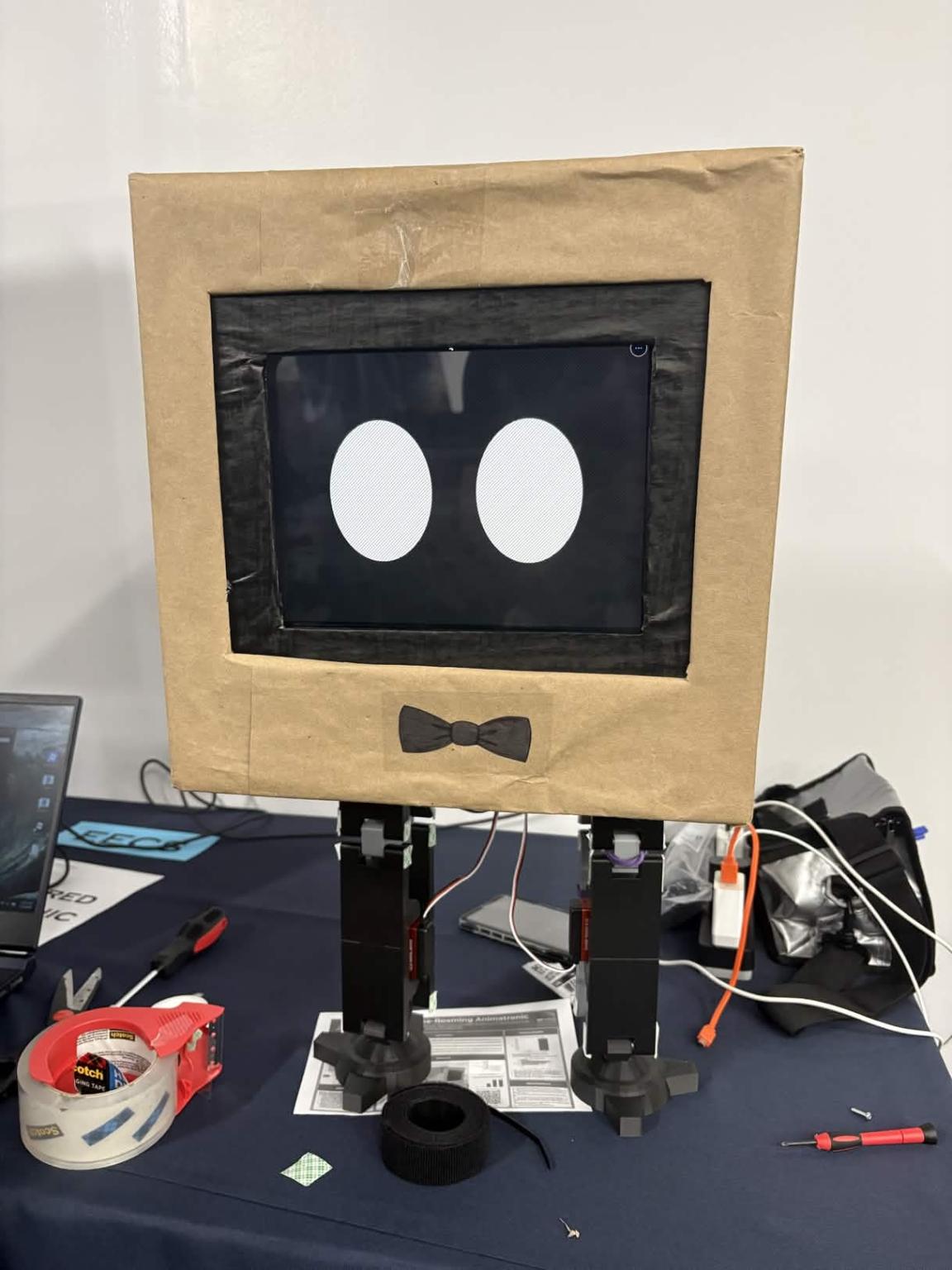
AI-Powered Free-Roaming Animatronic
2025-2026 - Fall, Winter
Interactive animatronics used in themed entertainment are often prohibitively expensive, typically costing thousands to tens of thousands of dollars, which limits their accessibility to large organizations and excludes smaller developers and venues. Additionally, many existing systems lack fully autonomous, real-time interaction capabilities and rely on scripted or remotely operated behaviors. This project addresses the need for a low-cost, scalable animatronic platform capable of engaging users through natural, personalized interaction. The work matters because it broadens access to immersive technology, benefiting smaller theme parks, museums, and independent creators while enhancing guest experiences.
Anteater Airplane
2025-2026 - Winter, Spring
To address the lack of standards and solutions from aircraft manufacturers, airlines, and the Federal Aviation Administration, our team is developing a custom wheelchair designed to ensure comfort, dignity and to reduce the number of transfers required for wheelchair users during air travel. This is due to air travel posing significant challenges for wheelchair users. When personal wheelchairs are handled by ground staff alongside luggage and other heavy cargo, they can often be returned damaged. This is particularly concerning because custom wheelchairs can cost over $30,000, and airlines typically provide limited accommodations or compensation for damage. Additionally, few solutions currently exist within commercial aviation to ensure comfort and safety for wheelchair users while boarding, during flight, and when deplaning. Although past efforts such as the Douglas CV-54C "Sacred Crow", Air4All, and Haycomp Eagle series have attempted to address accessibility, widespread implementation has been limited.

Anteater Baja Racing Driveline
2025-2026 - Winter, Spring
The UCI Anteater Baja Racing team is a 30+ member team tasked with designing, building, and testing an off-road race car for the SAE Baja competition each year. We are a subset of the team working to design, fabricate, and validate a controllable driveline test bench (DTB) to experimentally evaluate driveshaft behavior under varying angles, loads, and rotational speeds. This project is to address a diagnostic platform for understanding driveline inefficiencies and enable future vehicle modifications to be made for the rest of the Anteater SAE team.

Anteater Baja Racing Drivetrain (Phase 2)
2025-2026 - Winter
The UCI Anteater Baja Racing team is a 30+ member team tasked with designing, building, and testing an off-road race car for the SAE Baja competition each year. We are a subset of the team working specifically on transferring power from the CVT output to all four wheels. Last year, our car performed well at the 2025 SAE Baja competition in Arizona. However, it performed under its potential due to lack of testing. This year, we are emphasizing the testing and redesign of our previous design, and as such, our modular transfer case will be easy to modify and test the optimal performance of our car, verifying the design improvements. We want to design two iterations of the modular transfer case through testing with the first iteration finished before the end of fall and the final iteration finished by the end of winter. We will also develop a new output shaft to the front wheels...

Anteater Electric Racing - Rear Suspension Redesign
2025-2026 - Fall, Winter
The project focuses on designing a new rear suspension for the Anteater Electric Racing vehicle. Design focuses on simplicity to achieve reduced weight and cost, with improved serviceability through design for manufacturing and integration. The main focus lies within custom designed aluminum wheel hubs and welded sheet metal uprights, which were fabricated in-house at UCI’s student machine shop.

AquaDerm AI
2025-2026 - Fall, Winter
Dehydration is a serious yet widely overlooked health condition that occurs when the body loses more fluid than it takes in, potentially leading to complications such as heat injury, kidney problems, seizures, and hypovolemic shock. Despite these risks, millions of people worldwide fail to monitor their hydration levels adequately. AquaDermAI addresses this gap by developing a dehydration-sensing wearable that measures key physiological indicators — skin moisture via galvanic skin response, heart rate via photoplethysmography, and body temperature via thermistor — to detect and predict dehydration in real time. This solution is broadly applicable across diverse populations, from athletes and construction workers to individuals managing chronic illnesses, empowering users to proactively maintain healthy hydration habits.
ARISE Autonomous Quadcopter
2025-2026 - Fall, Winter
With advancements in technology and AI features, the ways of delivery are rightfully just to seek innovation for consumers. That in mind, the mission of this project is to design, build, and test a fully autonomous quadcopter that will be capable of carrying a 1-lb payload to a GPS waypoint 50 meters away, being able to detect the landing target, and releasing the payload gently within 1 meter of the specified landing zone. It will also have the ability to autonomously return to its starting point.

AudioVisor
2025-2026 - Fall, Winter
The AudioVisor project addresses the difficulty individuals with hearing impairments experience in perceiving and localizing sounds within their environment. Many everyday situations depend on auditory awareness, such as recognizing conversations, alarms, or approaching hazards, which can significantly impact safety and communication. This project functions by converting sound signals into visual cues that represent both the direction and intensity of surrounding audio in real time. By providing an alternative method to interpret environmental sounds, the AudioVisor enhances situational awareness and supports greater independence for individuals who are deaf or hard of hearing.
AuraBot: An Edge AI Desk Wellness Companion
2025-2026 - Fall, Winter
Prolonged sitting is common in modern study and work environments, particularly among students and office workers who spend long hours at a desk. This sedentary behavior can contribute to health issues such as reduced physical activity and musculoskeletal strain. AuraBot addresses this problem by acting as an edge-AI desktop companion that monitors user presence, tracks sitting duration, and provides timely wellness reminders through sensing and voice interaction. By integrating these features into a low-friction desktop system, AuraBot aims to encourage healthier work habits and regular movement during long work sessions.

AutoPill Dispenser
2025-2026 - Fall, Winter
Auto-Pill Dispenser was developed to address the problem of medication non-adherence among elderly and disabled patients who may forget doses, take the wrong quantity, or rely on caregivers for daily medication management. Traditional pill organizers still require manual sorting and tracking, while many existing automated dispensers are too expensive for widespread use. This project proposes a low-cost smart dispensing system that combines a 3D-printed mechanical design, embedded control, sensors, and a web interface to automate scheduled medication delivery. The project matters because missed or incorrect doses can seriously affect patient health, and the people most affected are seniors, individuals with chronic health conditions, and caregivers who need a more reliable and affordable medication management tool.

Backyard Bioremediation System - Teal Flow
2025-2026 - Fall, Winter
Households produce considerable amounts of greywater each month, which comes from different sources, including showers and sinks. While there is potential for reusing greywater, the majority of it is still being wasted. This has resulted in increased environmental stress. This concern has been addressed by the Teal Flow Backyard Bioremediation System. The project aims at creating a small-scale solar-powered filtration unit for greywater recycling. The filtration system includes a natural filtration system, which includes plant-based bioremediation, sand filtration, and activated carbon. The system has sensors that measure critical parameters, including pH and TDS. The value of these sensors must be within specific limits for reuse. The project aims at helping residents reuse greywater for irrigation. This will help reduce water loss and decrease water consumption. The project aims at promoting water management strategies during water scarcity.

Bubble Box
2025-2026 - Fall, Winter
E-SONIC is UCI’s Engineering-Symphonic Orchestra New Instrument Competition, where student teams design new playable musical instruments. Bubble Box is our team’s project within E-SONIC, using controlled bubbles and vortex structures inside a clear water chamber to create a playful audio-visual instrument. The project explores how a fluid phenomenon can be made repeatable, expressive, portable, and safe enough for public demonstration while remaining visually engaging and intuitive to experience.
Buoyancy Engine CAN Communications (BECAN)
2025-2026 - Fall, Winter
Buoyancy Engine CAN Communications (BECAN) is a user-controlled buoyancy engine designed to regulate the depth of a buoyant platform in aquatic environments. Precise depth control remains a significant engineering challenge for applications such as autonomous underwater vehicle docking and environmental monitoring. BECAN addresses this need by enabling controlled adjustment of system buoyancy through regulated water intake and release. This system provides a potential solution for industries and environmental agencies that require reliable underwater positioning and adaptive response to changing conditions.

Collaborative Edge–Cloud Machine Learning for Wildfire Detection
2025-2026 - Winter
Wildfires pose a significant threat to ecosystems, infrastructure, and public safety, creating a need for faster and more reliable detection systems. This project develops a collaborative edge–cloud architecture that integrates environmental sensors, UAV imagery, and machine learning models to detect wildfire ignition early. Edge-based models provide fast, low-power detection, while cloud-based models verify events using high-accuracy image analysis. This system improves detection speed, reduces false alarms, and enables monitoring in remote or resource-limited environments.

Control-Sea
2025-2026 - Winter, Spring
The RC boat to submarine project addresses the critical need for non-invasive, cost-effective monitoring of marine ecosystems by developing a submersible capable of autonomous species identification. By integrating a Raspberry Pi 4 for real-time image processing, the vehicle can detect and categorize marine life based on color and pattern recognition through its acrylic dome, providing researchers with high-fidelity data without disturbing the natural habitat. This matters because traditional manual surveying is often limited by diver depth constraints and the high cost of industrial submersibles, whereas this Pixhawk-stabilized platform offers a scalable solution for long-term biodiversity tracking. This technology directly benefits marine biologists and conservationists by automating the cataloging of indicator species, ultimately aiding in the protection of vulnerable aquatic environments through precise, localized data collection.
Background:
Aquatic environments are essential for environmental monitoring, infrastructure inspection, and scientific research, yet they remain challenging to study due to limited accessibility...
CubeSat Avionics and Attitude Control System
2025-2026 - Fall, Winter
The CubeSat Avionics and Attitude Control System focuses on developing flight software for a 2U (10x10x20 cm) nanosatellite. We designed algorithms to control the attitude, or orientation, of the satellite using only magnetorquers. A magnetorquer is a coil of wire that generates a localized magnetic field when a current goes through it; this magnetic field produces a torque to turn the satellite. Our software drives the magnetorquer to achieve detumbling, spin stabilization, and inertial pointing of the satellite.

CubeSat Avionics and Attitude Control System
2025-2026 - Fall, Winter, Spring
CubeSat ADCS requirements are driven by tight power/mass budgets yet mission success depends on reliable detumbling and pointing. We are building a magnetorquer-only ADCS and avionics stack for a 2U CubeSat that uses multi-mode control (B-dot detumble, spin stabilization, and inertial pointing) and FreeRTOS-based flight software on STM32, validated via hardware-in-the-loop simulation.
Dance Pose Estimation
2025-2026 - Fall, Winter
The Dance Pose Estimation project addresses the challenge of providing individualized feedback to large groups of dancers by creating an automated 3D pose evaluation web application. Traditional dance education often lacks the resources for instructors to give every student personalized instruction, which can slow down the learning process during private practice. By utilizing computer vision to compare student movements against a reference routine, the system empowers students to refine their technique independently while allowing instructors to focus on high-level group guidance. This project matters because it bridges the gap between digital accessibility and professional dance pedagogy, directly benefiting students and educators at institutions like the UCI Department of Dance.

Design and Fabrication of Programmable UGVs for Wireless Research
2025-2026 - Fall, Winter
Wireless communication research requires testing and verification in constantly changing environments. However, existing wireless testing platforms are costly, difficult to operate, or offer limited user configurability. This project presents a practical, low-cost, vehicle-based wireless research platform designed to address these limitations. By using affordable off-the-shelf components, we have developed an adaptable wireless network testing interface that is user friendly and easily configurable, providing a reliable and flexible testbed for experimental research.

Design Build Vertical Flight
2025-2026 - Fall, Winter, Spring
Background
DBVF is a student-run engineering team at UC Irvine that competes in the Vertical Flight Society’s annual Design-Build-Vertical Flight competition. Each year, university teams design, build, and fly electric vertical takeoff and landing eVTOL(electric-powered remote-control vertical take-off and landing) aircraft based on a real mission scenario.
Our members work across subteams such as airframe, avionics, and aerodynamics, all contributing to the controls, payload systems, and overall flight operations of the vehicle. Everyone gets real hands-on experience in design, fabrication, and testing as we get ready for the national fly-off held each spring in Maryland.
Design
The 2025–2026 theme is wildfire response. The mission simulates aircraft delivering “sandbag” payloads to marked zones representing wildfire hotspots, inspired by real events such as the 2025 Palisades Fire.
Our aircraft is being designed to:
- Take off and land vertically
- Fly quickly between drop zones
- Maneuver precisely during payload delivery
- Deliver payloads accurately
- Support ...
Design of a Banner Towing and Release Mechanism for Competition RC Aircraft
2025-2026 - Fall, Winter
UCI Design/Build/Fly (DBF) began in 2004, competing in that year’s AIAA competition with only 37 teams participating. Since then, the team has grown tremendously in both membership and technical sophistication. Today, UCI DBF competes against over 100 international teams, tackling new and complex design challenges each year. The team is composed of passionate students from various engineering disciplines who work together to design, manufacture, and test a fully functional remote-controlled aircraft that meets the competition’s unique mission requirements. Beyond the competition, UCI DBF provides students with hands-on experience in aerodynamics, structures, controls, electronics, and project management, preparing them for future careers in the aerospace and engineering industries.
Our team focuses on Mission 3 of the upcoming DBF competition, where we are required to stow, deploy, tow, and release a banner displaying our university logo. The primary problem this project addresses is the challenge of performing this sequence reliably on...
DialiTEAM: Developing a Real-Time Hematocrit Sensor
2025-2026 - Fall, Winter
Diality is a medical device company that aims to improve lives impacted by kidney disease through the development of the next generation of hemodialysis machines for at-clinic or at-home usage. A hemodialysis machine continuously extracts blood from a patient, runs it through a dialyzer--which acts as an artificial kidney to filter out waste and excess fluids--and reintroduces the filtered blood into the patient's system. This treatment process occurs three times per week for three to four hours per session depending on the patient's support needs. A common issue with treatment currently is knowing the correct Blood Volume Removal Rate (BVRR) for each patient. If the BVRR is too low, the treatment becomes inefficient and takes longer than required, but if it is too high, the patient's blood pressure could drop significantly putting the patient at risk of complications such as dizziness or loss of consciousness. Poor reactions such as these...
Drop Tower Systems
2025-2026 - Winter, Spring
Drop Tower Systems focuses on the design and development of a low-cost drop weight impact tower for UCI Engineering. The system is intended to address the current lack of an in house method for applying controlled dynamic loads to materials and components, since existing campus equipment is primarily limited to static testing. This project matters because many real world engineering applications involve impact and other dynamic loading conditions that static tests cannot fully represent. The final design is meant to support students, faculty, and project teams by providing a safer, more repeatable, and more accessible way to validate components and materials under realistic loading conditions.
EchoSafe
2025-2026 - Fall, Winter
Industrial environments often require workers to interact closely with robotic machinery, creating safety risks during operation and maintenance. This project addresses the need for a safer and more responsive control interface by developing EchoSafe, a low-power edge-AI speech keyword detection system. The system allows operators to control machinery using voice commands such as “go” and “stop,” reducing the need for manual interaction near hazardous equipment. By running entirely offline, the system also improves reliability, security, and privacy compared to cloud-based voice systems.

Electromagnetic Suspension (EMS) Levitation Model
2025-2026 - Winter, Spring
Hyperloop is an innovative high-speed transportation concept in which pods travel at up to 760 mph through a near-vacuum tunnel. To reach those speeds, the pod must eliminate nearly all friction with the track, which is achieved through magnetic levitation (maglev).
One method of integrating maglev technology is electromagnetic suspension (EMS). With EMS, electromagnets on the pod produce an attractive force to a magnetized material on the track, lifting the vehicle off the surface entirely. UC Irvine's Hyperloop student team, HyperXite, needs to demonstrate that this technology works at a small scale before it can be integrated into a full-size pod. Without a working levitation prototype, the team has no way to validate their design choices, test their control systems, or demonstrate the concept to advisors and sponsors.
This project matters because magnetic levitation is the key to making Hyperloop viable. It's what separates it from conventional high-speed...

Electromyography (EMG) Controlled Prosthetic Hand
2025-2026 - Fall, Winter
Traditional prosthetics are often prohibitively expensive, ranging from $5,000 to over $100,000, and frequently require invasive medical procedures to function. This leaves many individuals in need of amputee care unable to afford or comfortably access life-changing mobility aids. To address this critical accessibility issue, our project developed a low-cost, electromyography (EMG) controlled prosthetic hand that utilizes a non-invasive dry-electrode placed on the user's wrist. By eliminating the need for invasive procedures and drastically reducing manufacturing expenses, this project demonstrates the viability of highly accessible, neural-network-driven prosthetics for a broader demographic
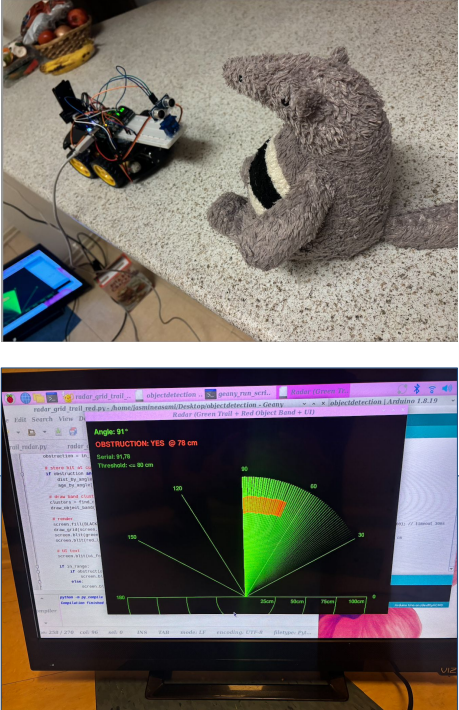
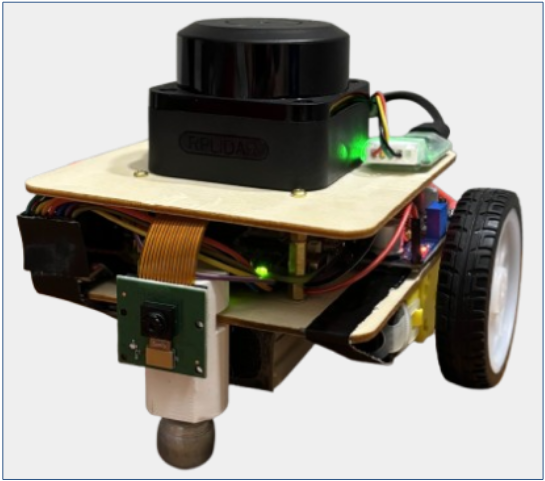
Embedded Autonomous Navigation and Real-Time Radar Visualization System
2025-2026 - Winter
This project presents the design and implementation of an embedded autonomous navigation system featuring real-time ultrasonic radar visualization. Originally conceptualized as a Smart Digital Closet, the project's scope was strategically redefined to focus on a technically rigorous robotics platform capable of environmental scanning and autonomous decision-making. The system addresses the need for low-latency obstacle detection in mobile robotics by providing a 180 spatial awareness interface. This work is significant for developing accessible, real-time sensing solutions for autonomous indoor vehicles.
Facial-Orientation and Concentration Understanding System (FOCUS)
2025-2026 - Fall, Winter
The Facial-Orientation and Concentration Understanding System (FOCUS) addresses the growing challenge of maintaining attention among young students, particularly those with ADHD or focus-related difficulties, in learning environments. Many students struggle with sustained concentration during independent work, and there is a lack of accessible, real-time tools that provide immediate, personalized feedback on attention levels. This project develops a webcam-based application that analyzes facial orientation, gaze direction, and behavioral indicators to detect inattention and deliver timely reminders. By supporting students, educators, and caregivers with actionable insights, FOCUS aims to improve engagement, learning outcomes, and overall academic performance.
FLAM@UCI
2025-2026 - Fall, Winter, Spring
The goal of the FLAM@UCI project team is to collaboratively construct a museum-quality restoration of a 1918 Curtiss JN-4D "Jenny," an iconic World War I-era biplane used primarily for training U.S. military pilots. The restored aircraft will be non-flying but must accurately represent the original aircraft in dimensions, appearance, and structure, down to the materials, methods, and finishes wherever possible. The Curtiss JN-4D will be a featured piece at the Flying Leatherneck Aviation Museum, currently being built in Irvine Great Park. This isn’t just a build project — it’s a historical reconstruction effort requiring technical precision, planning, and teamwork.
This collaboration engages UCI undergraduate students in an immersive, hands-on learning experience by partnering with the expert staff/volunteers of the Flying Leatherneck Aviation Museum (FLAM) and the Experimental Aircraft Association (EAA). Through the joint effort of building a historically accurate replica of the 1918 Curtiss JN-4D “Jenny” with original/replica parts,...
Flapping Wing Micro-Air Vehicle
2025-2026 - Fall, Winter, Spring
About Us
Humans have achieved flight, yet birds and insects still surpass man-made aircraft in agility and control. The Flapping Wing Micro Air Vehicle (FWMAV) team seeks to uncover how nature achieves such mastery. By studying creatures like hummingbirds and dragonflies, engineers analyze the unsteady aerodynamics and nonlinear mechanisms that enable efficient, stable flight.
FWMAV’s small, agile, and hovering capabilities have applications in law enforcement, defense, and scientific research. The project investigates the physics behind flapping-wing flight to design innovative aerial systems.
Subteams
- Alpha Quadflapper: Optimizing a Quadflapper that is robust enough to perform maneuvers that are critical to showcasing the flapper.
- Gamma Quadflapper: Creating a “framework” that allows for the rapid prototyping of robust Gamma Quadflapper iterations.
- Novel 1 - X-Wing: Creating a Variable-Frame-Angle Quadflapper drone that can take advantage of theoretical efficiency benefits.
- Novel 2 - Single Wing: Optimization of a true Micro-Air-Vehicle (<50 ...

Fluid Power Vehicle Challenge - Zot Under Pressure
2025-2026 - Fall, Winter
The Fluid Power Vehicle Challenge is a national competition among universities hosted by the National Fluid Power Association that challenges students to implement a hydraulic braking and power system to a human powered vehicle. The competition consists of 4 events, which test the speed, endurance, efficiency, and regenerative braking capabilities of the vehicle. We, Zot Under Pressure, are creating a tricycle that converts human input into hydraulic power, focusing on speed and endurance. Our team will represent UCI in the competition and showcase the applications of hydraulic power.

FogHacks
2025-2026 - Fall, Winter
Low visibility caused by fog presents a significant safety challenge for drivers on the road. This project presents FogHacks, an AI powered hazard detection system designed to detect road hazards in foggy environments using image detection ML models and defogging algorithms. The system integrates a Raspberry Pi 5 with a Pi Camera to capture real world images then utilizes defogging techniques to improve visibility before performing object detection. A customized YOLOv10 model was trained on road sign and foggy driving datasets to identify key road hazards such as cars, buses, bicycles, pedestrians, and traffic signs. To improve detection performance under foggy conditions, two defogging techniques, Contrast Limited Adaptive Histogram Equalization (CLAHE) and Dark Channel Prior (DCP), were implemented in the preprocessing pipeline. Testing on this custom model found improvements in accuracy as compared to the base YOLOv10 model, with some variation in results due to factors such as glare and...

Formula Friction: Brake Dynamometer
2025-2026 - Winter, Spring
The braking system of an FSAE Electric vehicle operates under highly transient thermal and mechanical conditions, where frictional heating, material behavior, and heat dissipation strongly influence performance and reliability. During repeated or high-energy braking events, rotor and pad temperatures can rise rapidly, altering the effective coefficient of friction and therefore modifying brake torque generation, stopping distance, and vehicle deceleration. Understanding these temperature-dependent effects is essential for accurate brake modeling, safe design margins, and competition performance.
Fuel Blending System Control and Demonstration
2025-2026 - Fall, Winter
The UCI Combustion Laboratory tasked our team with updating their currently outdated hardware and control program for their gas mixing station.
The laboratory was previously using twenty-year-old FieldPoint hardware and software to control their gas mixing station, which is used to mix different gas compositions for combustion research. These experiments are critical for understanding fuel behavior, improving energy efficiency, and supporting safer and more sustainable combustion systems in industrial and aerospace applications.
Due to the entirety of the gas mixing station being outdated, a complete overhaul of both the hardware and software was required to ensure that the system would remain operable into the future. Additionally, new functionality was needed to ensure accurate gas mixing under high-pressure conditions (approximately ten atmospheres), including implementing an internal validation check to ensure the specific gravity of the gas composition matches the theoretical value within five percent.
...

FUSION Engineering Project: Fire Extinguisher Rover
2025-2026 - Winter, Spring
Background
The FUSION Engineering Project, as an integral component of FUSION, offers extensive learning opportunities that extend beyond the confines of traditional classroom education. This project fosters professional growth, catering to students at various stages of their educational journey, be it novices learning software applications like SolidWorks or TinkerCAD, or more seasoned engineering students seeking to grow their leadership capabilities through team management and mentorship. The FUSION Engineering Project (FEP) represents an intermediate-level project designed to impart crucial engineering skills to students at various stages of their academic journey.
Goal and Objectives
This year's project structure includes both mechanical and hardware components. The mechanical team is responsible for the design and prototyping of the frame and drivetrain, while the hardware team is responsible for the wiring of the rover and integrating any software needed. The objective of each team is to create a rover that’s able to...

Grocery Store Robot: Arm Manipulation
2025-2026 - Fall, Winter
Modern grocery stores and warehouses still rely heavily on manual labor to fulfill item retrieval tasks from shelves. This process is time-consuming, labor-intensive, and prone to inefficiencies as order volumes continue to grow. There is an increasing demand for automated systems that can improve operational efficiency while maintaining safety and precision in retail and warehouse environments.
This project focuses on the development of an autonomous robotic arm capable of retrieving items from shelves in a grocery store setting. The system aims to perform precise, collision-free grasping of target items while operating in a constrained shelf environment. By automating repetitive picking tasks, the project seeks to improve efficiency and reduce the reliance on manual labor in grocery fulfillment operations.
The project is sponsored by Professor Solmaz Kia and developed by a student team in the MAE capstone design program. The primary stakeholders include grocery store operators, warehouse automation systems,...

Grocery Store Robot: Base Team
2025-2026 - Fall, Winter
The goal of the project is to create a proof-of-concept for an autonomous robot to aide in grocery/retail stores. This robot would be would be assigned items to grab, and it would plan an optimized path to retrieve the items. This project is split into two teams; our team focuses on the robotic base that allows for movement and navigation. The base of the robot must be able to localize itself and plan a path to and from the target. If during operation the robot should detect an obstruction, the robot needs to recalculate a path around it while leaving adequate space to avoid collision. In addition to the functions above, the robot must be able to detect when it is within arms reach of a target item using the dimensions of each arm linkage and distance (including height) from the target. This project can make the shopping process easier,...
HERMES: Hazardous Environment Reconnaissance and Mapping Exploration System
2025-2026 - Fall, Winter
Disaster situations require a swift and agile response to identify all victims in hazardous environments, but human efforts may be limited due to environmental severity. HERMES is an autonomous robotic system composed of a compact robot and a centralized server that will aid rescue operations. Rather than relying on a static map, the server utilizes behavior trees to drive autonomous decision-making. This framework enables the robot to systematically explore unknown spaces by dynamically balancing thorough area coverage with victim identification. At deployment, the controller synthesizes sensor data to localize the robot, map victim positions, and ensure autonomous, collision-free navigation.

Heterogeneous Multi-Agent Containment Control System
2025-2026 - Winter, Spring
Our senior design project focuses on the revival and development of a heterogeneous multi-robot containment and escort system utilizing a Hiwonder SpiderPi hexapod robot as the leader and four TurtleBots as the escorts or followers. This project introduces students to coordinated control, real-time communication, and containment logic across the robot team, and in the future could aim to aid real-world applications like automation, surveillance, other laboratories, and possibly the military.
The primary objective of our project is to integrate the SpiderPi and TurtleBot2 platforms using a ROS2 communication framework, enabling the TurtleBots to hold a convex hull escort formation around the SpiderPi as it navigates its environment. This project also aims to achieve our sponsor’s goals of modernizing older versions of her robotic hardware, extending her lab’s capabilities, and providing future students with a framework to grow with the ever-evolving multi-agent robotic research.
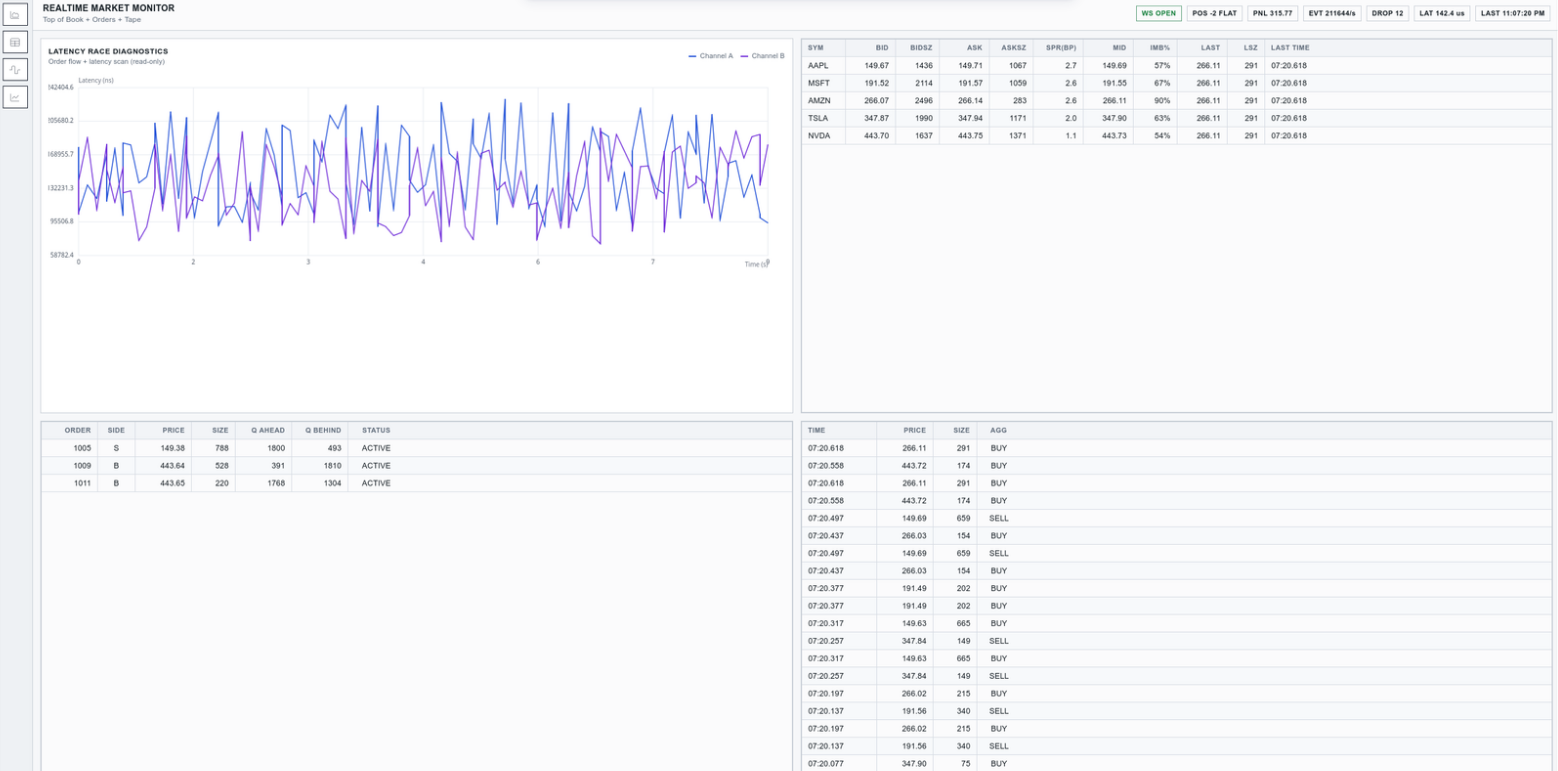
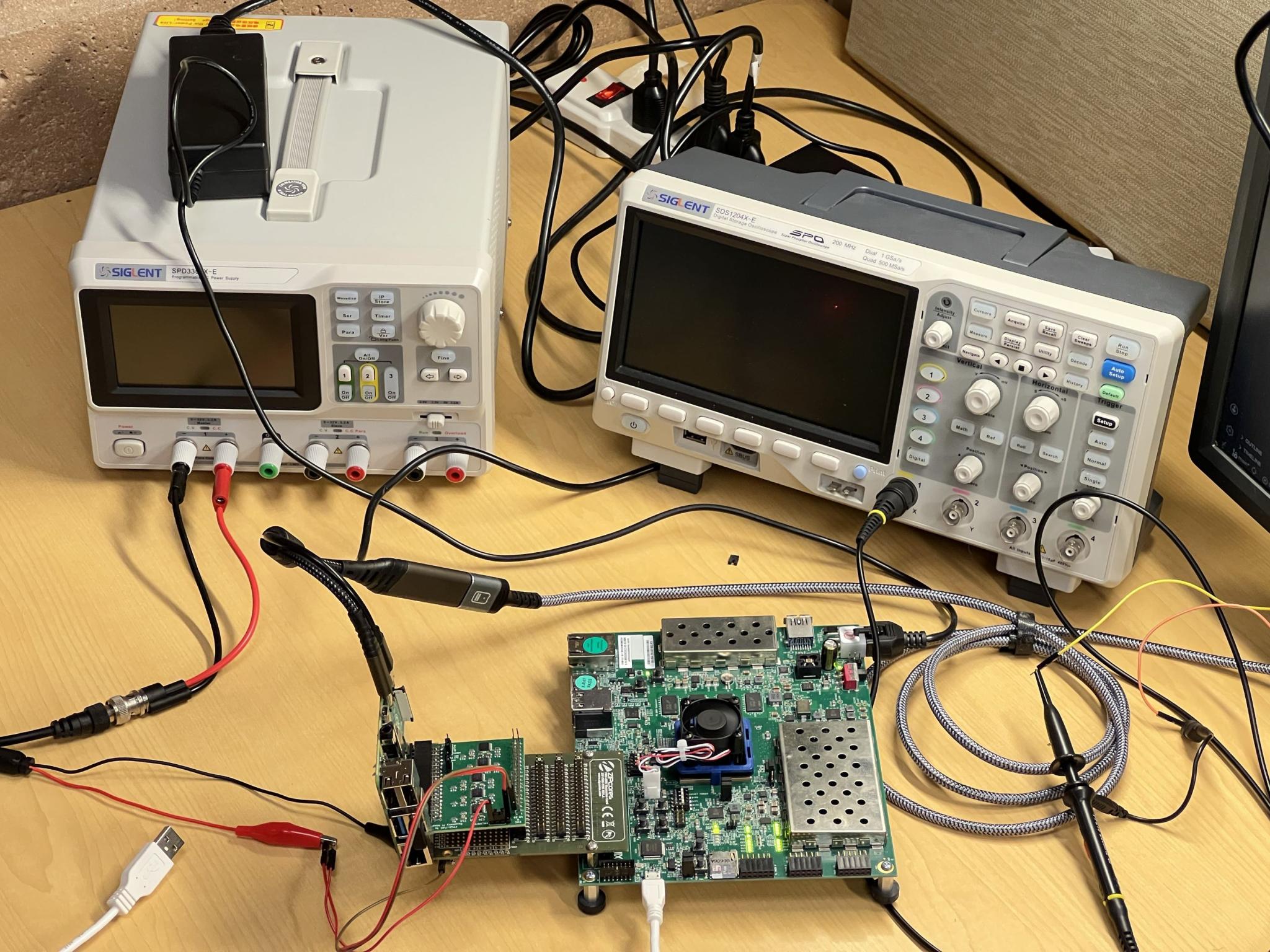
High Frequency Trading Project
2025-2026 - Fall, Winter
The global financial markets process trillions of dollars daily, making microsecond-level order execution critical for high-frequency trading (HFT) profitability. Standard CPU-based trading engines often struggle with performance bottlenecks due to sequential execution and memory access limitations. This project addresses the need for ultra-low-latency, high-throughput computing to execute large volumes of trades in real time. By overcoming software limitations, the system provides a scalable solution that benefits modern financial institutions and traders relying on speed and reliability. The system utilizes a hybrid hardware-software architecture, employing an FPGA-based Tensor Processing Unit (TPU) to run a lightweight neural network for intelligent order placement. A novel FPGA-based MultiQueue BRAM architecture is used for deterministic, parallel order matching. Meanwhile, the host computer manages over 100,000 orders using lock-free Red-Black Trees for cache-efficient, large-scale storage. The machine learning component leverages a Proximal Policy Optimization (PPO) reinforcement learning agent to dynamically rank trades for caching in the...

High Tech Art Exhibit - The Interactive World of Anteaters
2025-2026 - Fall, Winter
The job of an engineer is to solve problems that occur within society whilst minimizing costs and maximizing the efficiency, safety, and applicability of their solutions. Where most other design projects aim to solve quantifiable problems, our project aims to expand engineering by working to solve the growing problem of fleeting creativity and joy through an artistic approach in addition to rigorous engineering analysis. In the digital era, screens and passive consumption dominate our attention, defining a societal need for tangible, interactive experiences that reconnect people with their sense of wonder. The High-Tech Art Exhibit aims to reframe the UC Irvine community's view of engineering as more than sterile technology and profit, instead focusing on the inherent creativity and joy that is deeply embedded within the design process itself.

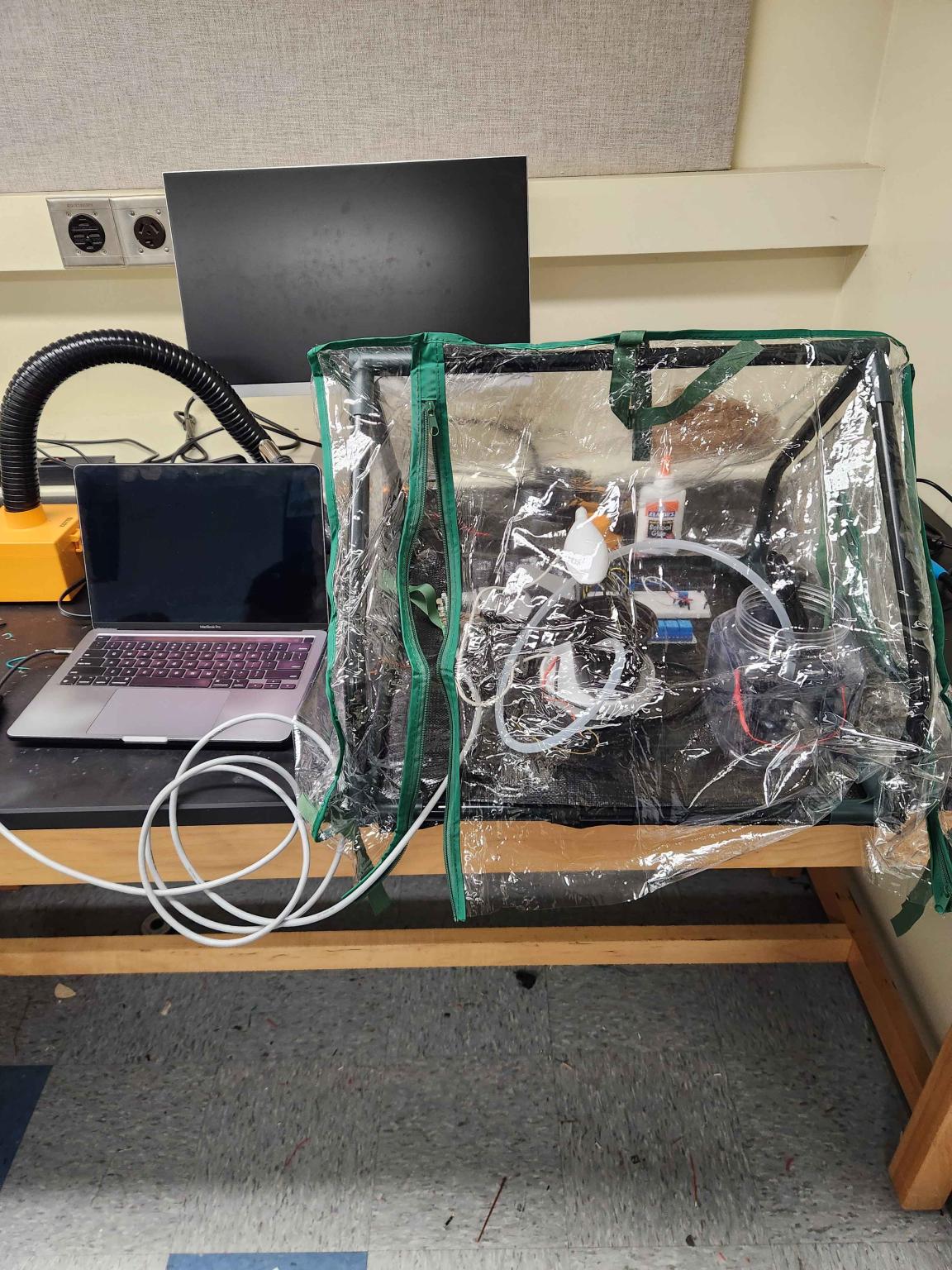
HoloPhase
2025-2026 - Fall, Winter
HoloPhase is a projection system designed to render clear images through dynamically changing turbid media such as fog, where Mie scattering would otherwise blur and distort the projected content. Our approach combines computational optics, a Digital Micromirror Device (DMD)– based wavefront shaper, and a camera-in-the-loop optimization pipeline that iteratively updates the projected wavefront to compensate for scattering. By jointly designing the optical setup, fog chamber, and control software, we can recover higher-contrast, sharper images through fog than conventional, uncorrected projection.

Human Powered Vehicle Competition at UCI
2025-2026 - Fall, Winter, Spring
HPVC@UCI is a multidisciplinary team of undergraduate engineers at the University of California, Irvine competing in the ASME Human Powered Vehicle Challenge (HPVC). Our mission is to design, build, and race a human-powered vehicle that pushes the limits of sustainability, safety, and performance. HPVC fosters real-world application of mechanical and structural design, aerodynamics, and human-centered engineering. Our team is committed to innovation, teamwork, and hands-on learning beyond the classroom. The team is split into four subteams, Statics, Dynamics, Electrical, and Operations. Currently, our goals are to improve on last year’s design by reducing weight by 25%, incorporating a suspension system onto the vehicle, and ensuring safe operation with an emergency stop should damage to the battery or motor occur.
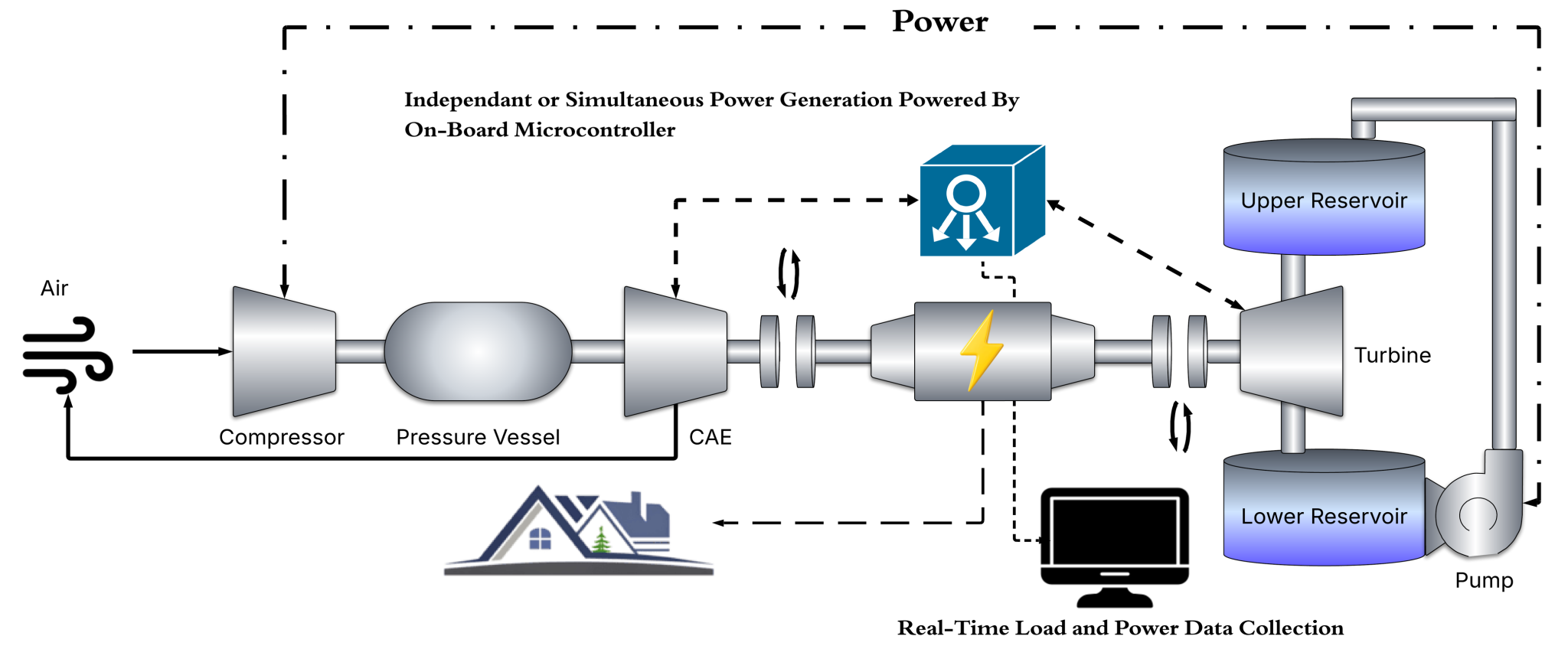
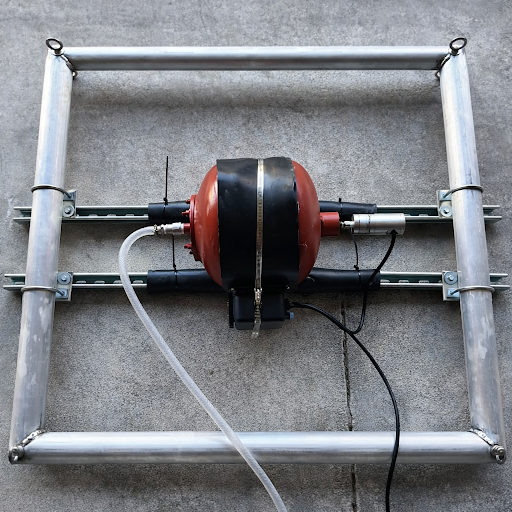
Hybrid Mechanical Energy Storage
2025-2026 - Winter, Spring
The Problem
Renewable energy sources like wind and solar generate electricity intermittently, often producing excess energy when demand is low and falling short when demand peaks. Today, the dominant solution for bridging that gap is electrochemical batteries. While effective, batteries carry significant drawbacks: they rely on resource-intensive mining of lithium, cobalt, and other minerals, degrade over time, pose environmental disposal challenges, and can be prohibitively expensive at scale.
Our Approach
PetrChu is a benchtop-scale hybrid mechanical energy storage system that demonstrates an alternative. The system combines two well-established storage methods into a single integrated platform:
-
Compressed Air Energy Storage (CAES)
-
Air is compressed into a pressure vessel during periods of excess energy. When power is needed, the stored air drives a reciprocating piston engine connected to an alternator.
-
Pumped Hydro Storage
-
Water
...
HydraShift - RC Boat to Submarine
2025-2026 - Fall, Winter
RC boats are widely commercially available, while RC submarines remain a costly, niche product. Therefore, the objective of this project is to transform an off-the-shelf 1:18 scale RC boat into a submersible submarine capable of underwater and surface maneuverability, and can dive to a depth of at least three meters before reliably resurfacing. Some goals in this include developing a ballast system to resist hydrostatic pressure and achieve buoyancy, sealing electronics to ensure waterproofing at high depths, and underwater propulsion.

Key Vending Machine
2025-2026 - Fall, Winter
The UCI engineering facilities and students rely on a large number of room keys including things for labs, workshops, and specialized project spaces. Currently, key distribution is handled manually by staff members who must approve requests, check out keys, and track returns. This process is often slow, inefficient, and difficult to keep organized. A more efficient and automated solution is needed to streamline the key checkout and return system, reduce staff workload, and improve overall organization. This project addresses this need by developing an automated key vending machine that securely stores and dispenses keys through a digital request and approval system, improving accessibility, efficiency, and trackability for all students, staff, and faculty who rely on these facilities.
KIWI Logistics: Autonomous Warehouse Robot
2025-2026 - Winter, Spring
Kiwi Logistics aims to design and build an autonomous warehouse robot capable of navigating a structured indoor environment, detecting obstacles, and operating within an inventory management workflow. Current warehouse operations depend significantly on extensive physical labor to lift and transport inventory, often leading to a high risk of workplace injury or long-term health problems. The goal of our design is to present a scalable, easy-to-use autonomous inventory management system that tackles the risk of manual labor without eliminating human jobs in warehouse operation.
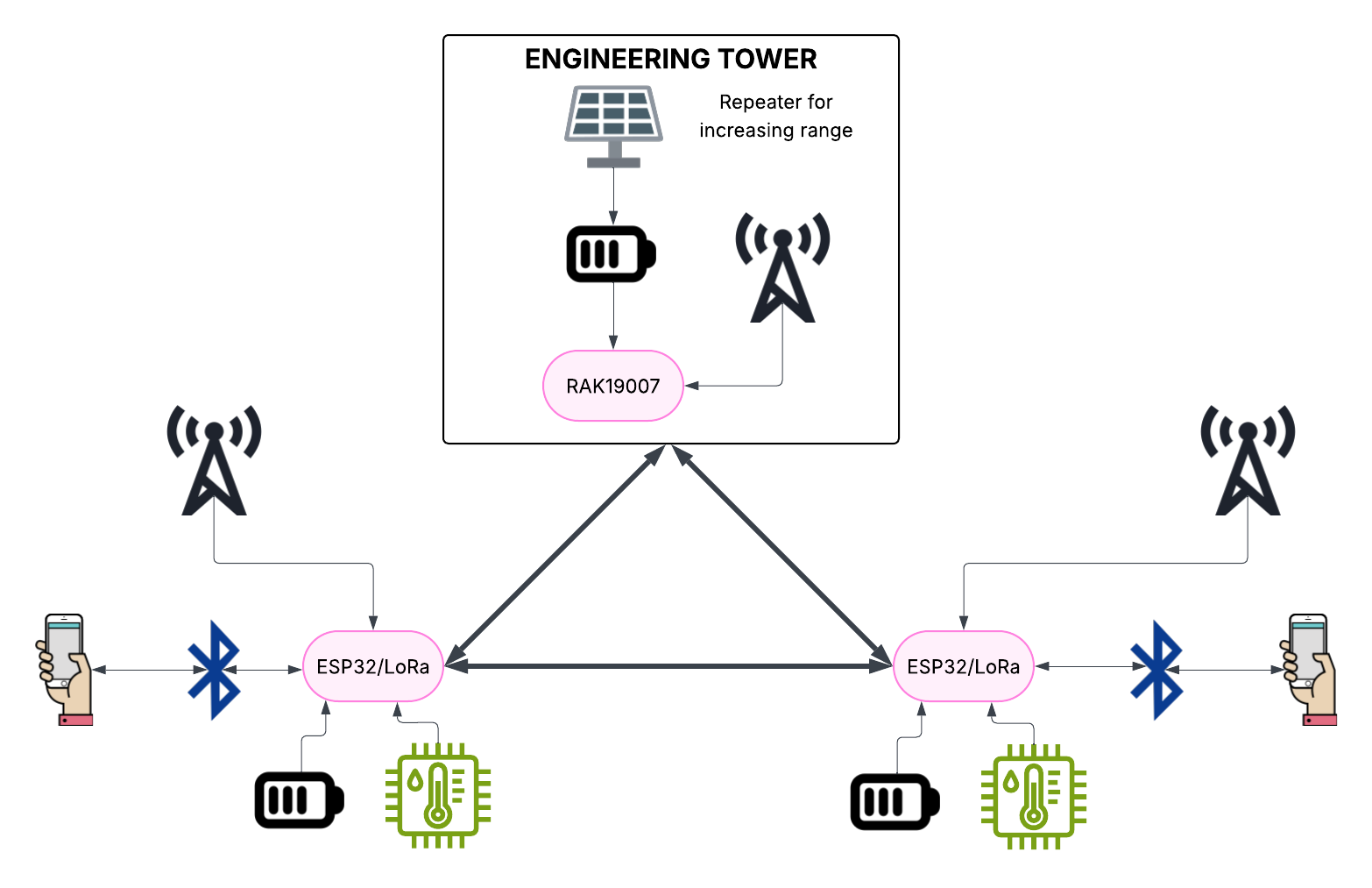
LoRa Communication System
2025-2026 - Fall, Winter
Our project address the need for reliable, low-cost communication in areas where traditional networks (cellular or internet) are unavailable, unreliable, or compromised (such as during natural disasters, remote outdoor activities, or infrastructure outages). The project's goal is to create a decentralized, off-grid messaging networks using low-power LoRa radios, enabling users to communicate over long distances without centralized infrastructure. This project can be impactful for a wide range of individuals who depend on consistent access to communication in challenging or unpredictable environments, which can include outdoor enthusiasts, emergency responders, rural communities, and anyone requiring secure, infrastructure-independent communication.

Mag-Vengers
2025-2026 - Fall, Winter
Mag‑Vengers is a senior design project in collaboration with a local defense company that focuses on remote data collection at impacted areas using drones. The team aims to advancing drone functionality through the use of electropermanent magnets and has developed a lightweight, durable drone attachment system embedded with EPMs to create a strong, switchable magnetic latch. Controlled electronically, the latch can be turned “on” or “off” to securely hold and individually release six (or more) sensor pucks during high‑speed flight.
The project’s goal is to deliver a fully functional prototype that is reliable, aesthetically clean, and easy to modify for future teams or organizations. Through the utilization of EPMs, the team aims to reduce size, weight, and power (SWaP) requirements. Over the course of two academic quarters, the team has applied skills in CAD modeling, simulation, prototyping, and documentation to design, test, and refine the system. Milestones include initial...
Microfluidic Cell Engineering Platform
2025-2026 - Winter, Spring
The BioMiNT Lab at UC Irvine has developed a microfluidic platform that uses AESOP technology to deliver genetic material into cells, which engineers them to fight diseases like cancer. Ex vivo cell and gene therapy has the potential to save lives. Despite having a successful prototype, the problem is that the platform is currently made from Polydimethylsiloxane (PDMS), a silicone polymer that only lasts about ten minutes during operation and cannot be mass-produced quickly or at a low cost. Team FloBoss’s objective is to transition this platform to one of the following thermoplastic materials: Flexdym, Polystyrene (PS), and Polymethyl Methacrylate (PMMA). These materials will extend the operation time, increasing the throughput, lowering manufacturing costs, and enabling large-scale production. Scaling up this technology allows cell-based therapies to be more accessible to hospitals, medical professionals, and the patients who need this care the most.
MicroMola
2025-2026 - Fall, Winter
The United Nations estimates that 400 million tons of plastic are produced annually leading to 4.83 trillion microplastic (MP) particles floating in the ocean. When ingested by humans, MPs cause inflammation, endocrine disruption, and DNA damage. MicroMola is a semi-autonomous floating near-surface robot designed to reduce microplastic density and support ocean health monitoring efforts by agencies like the EPA and Orange County Water Board. The main objective of the robot is to reduce the microplastic density in a body of water with minimal maintenance. The key impact is filtration of MPs as MicroMola possesses the potential to help reduce the risk of MPs to human health and ocean ecosystems. During fall quarter, the initial design of the MicroMola was completed by determining a bill of materials, calculating the necessary power budget, and discussing the protocols for communication. In the following Winter Quarter, the objectives achieved were: completing a working control...
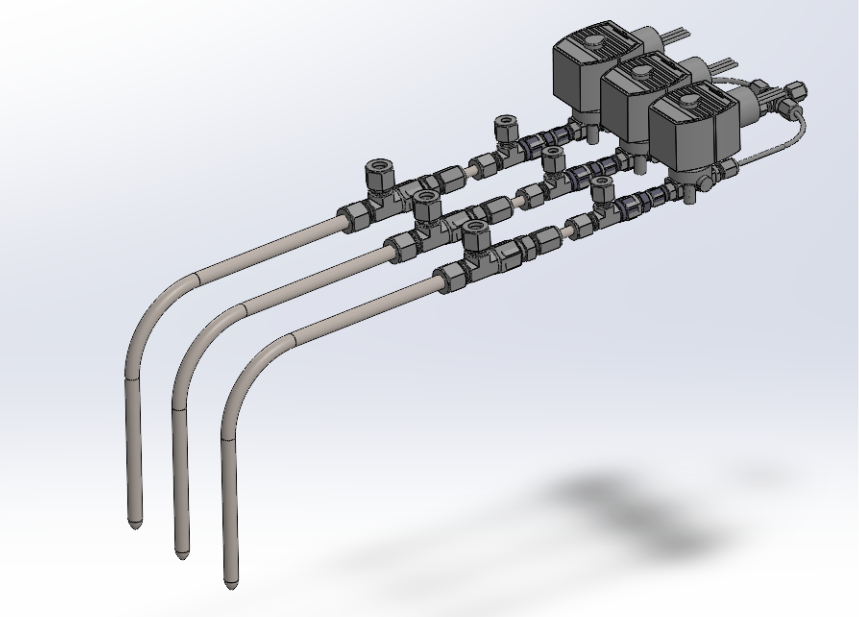
Multiport Emissions Sampling Probe
2025-2026 - Fall, Winter
The Multi-Port Exhaust Emissions Sampling Probe was built to improve the accuracy and versatility of exhaust gas sampling in H₂–NG combustion testing. It has multiple independently controlled sampling ports so that emissions can be sampled at various positions within the exhaust stream without having to move the probe. The design uses modular fittings (Swagelok), which allow the system to be easily assembled or disassembled and to be scaled up to accommodate different experimental test rigs. Each port is attached to a solenoid valve system that is controlled by an Arduino and DAQ interface to automatically switch between sampling positions. The probe is also able to be moved in three dimensions to provide complete coverage of the measurement area and to allow for adaptation to different combustor geometries. This system is more efficient and repeatable and has higher spatial resolution than previous systems for emissions diagnostics. It will serve as a...
Narcotic Network: Autonomous Medical Delivery Drone
2025-2026 - Fall, Winter
Narcotic Network aimed to design a lightweight device that provides quick and accurate medication delivery to patients living within 0.5 km of a pharmacy. Although Amazon Prime and FedEx Overnight offer one-day delivery, current commercial methods remain costly, inconsistent, and impersonal, especially outside urban areas. Therefore, underserved patients in suburban and exurban regions need novel medical delivery methods. The Narcotic Network Autonomous Delivery Drone, a 1.9 kg quadcopter, autonomously carries up to 0.5 kg of medication of various forms to patients who are unable to leave their homes. By transporting medication directly from pharmacies to elderly and terminal patients who need frequent medication refills, Narcotic Network enhances the customer experience by ensuring personalized, prompt delivery of high-priority medicine.
Omni-Pedal: A Multi-Effects Pedal
2025-2026 - Fall, Winter
“Omni-Pedal” is a digital multi-effect guitar pedal, that is accessible and affordable for guitarists or music enthusiasts of any skill level. The guitar pedal is built from the ground-up off of a Raspberry Pi to perform digital signal processing (DSP). Through DSP, seven guitar effects can be applied to the input signal from the guitar to change the sound of the guitar to the user's choice. The interactive GUI of the pedal also allows for accessible switching between the different guitar effects and also adjusting the volume, mix, and other parameters of the effect over the guitar's sound.
ORTHON- A Dynamic Orthotic Device
2025-2026 - Winter, Spring
ORTHON’s purpose is to create a proof of concept for a dynamic orthotic system capable of treating severe foot conditions that concern painful flat foot and ulcer prone diabetic foot issues. This dynamic orthotic looks like a wearable shoe insert that can detect pressure and/or temperature in order to react with the necessary support for the user’s foot. For such conditions, the current medical orthotic solution is a rigid, static shoe insert originally invented in the 1950s. Meanwhile, the human foot is one of the most dynamic mechanical structures in the body with 33 joints and 26 bones. Although they may be clinically effective, many users find their rigid inserts to be uncomfortable, discontinuing the prescribed use and resulting in surgery. As for those with diabetic neuropathy, there is currently no prevention options only devices that are applied to the wound after they occur, an example of this is donut...
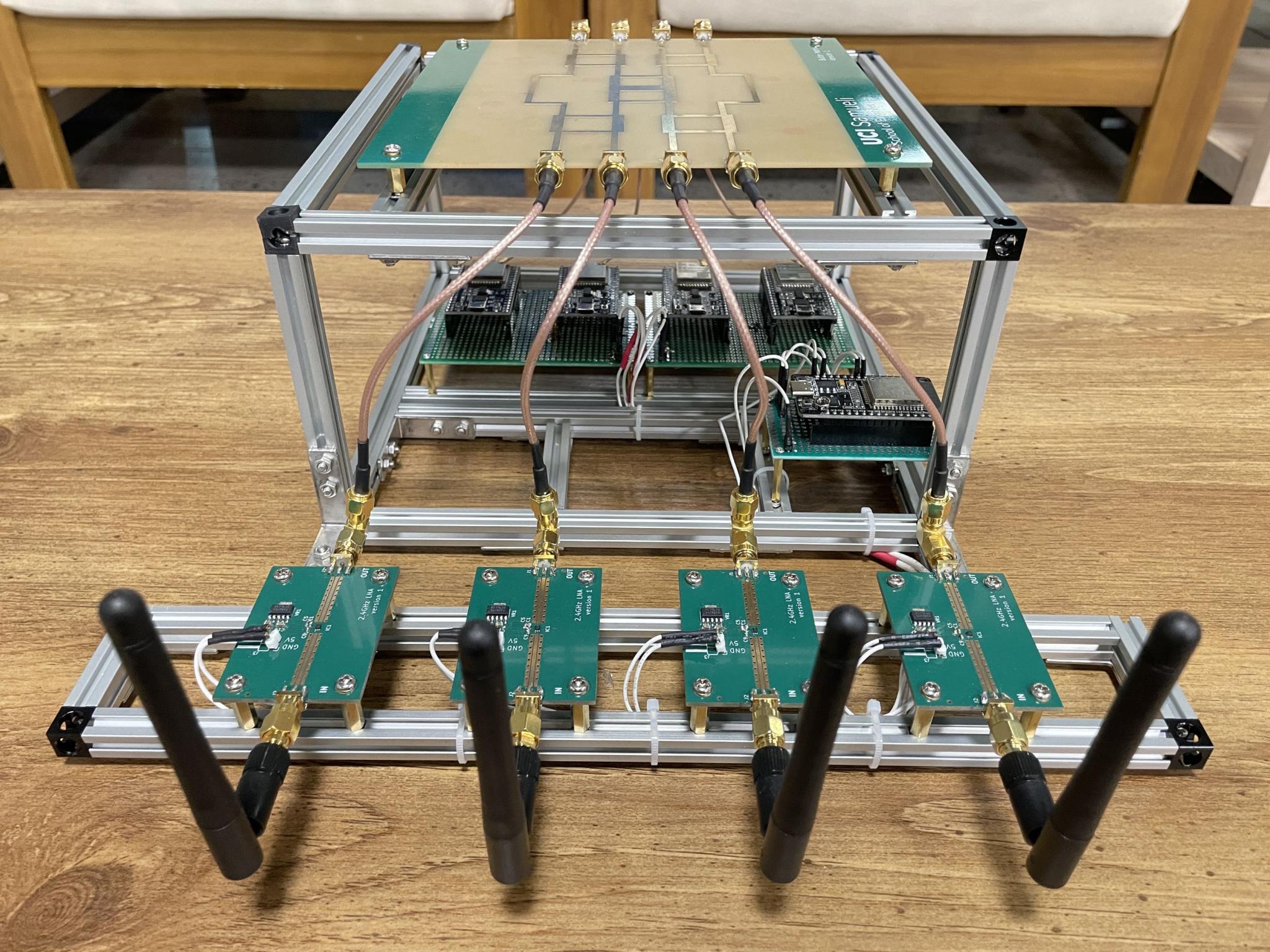
Passive Analog Beamforming Drone Monitor
2025-2026 - Fall, Winter
The FAA now requires all drones to be compliant with Remote ID, requiring an on-drone device that transmits information about itself over Blutetooth or WiFi. However, these signals can be weak and may not be picked up by user devices alone. Traditional methods of increasing reception range involve high cost and complex fully-coherent sampling digital beamformers. By leveraging a hybrid digital-analog beamforming strategy, this project achieves a similar result a remarkably lower cost, complexity, and footprint.
The goal of this project is to increase the reception range of 2.4GHz Bluetooth/WiFi signals by using an antenna array fed into a passive RF network allowing multiple different directional beams to be monitored at the same time using low cost microcontrollers. The collected data is sent over Bluetooth to a user device where the information is displayed on a custom React Native app.
PeterBot - Autonomous 4-Legged Walking Robot
2025-2026 - Fall, Winter
PeterBot is an autonomous walking robot developed by MAE 151 Team 7 under the sponsorship of Professor J. Michael McCarthy. Building upon Professor McCarthy’s MAE 183 mechanical walker design, this project focuses on transforming the existing walking platform into an intelligent system capable of autonomous navigation. The project’s main challenge is reliably integrating the electronics to control stiff geared mechanisms.
This work is relevant to students, researchers and roboticists interested in implementing autonomous mobility on unconventional non-wheeled platforms. By developing PeterBot, Team 7 created a foundation for future students to create autonomous walking robots that can complete higher-leveled tasks.

Photon Flight: Fiber-Optic Autonomous UAV
2025-2026 - Fall, Winter
The Photon Flight (Autonomous UAV) project focuses on creating a high-performance tethered drone capable of sending two real-time video streams and complete flight telemetry through a single fiber optic cable. Using a lightweight fiber tether instead of conventional RF connections, the platform demonstrates how advanced networking, optical communications, and embedded systems can be merged within an aerial vehicle. Throughout the process, the team gains experience with IP video streaming, low-latency video encoding, network design, Embedded Linux integration, and connecting entire system with a flight controller (MATEK F405). The main objectives are to build a reliable, high-bandwidth communication system, show consistent fiber-based command and control, and assess the advantages of optical tethering for secure, interference-resistant drone operations. In the end, this drone acts as a test platform for new communication technologies in robotics, monitoring, and environments where electromagnetic interference is an issue.
The main goal of this project is to...
Portable Ankle Measuring Proprioceptive Device (PAMPD)
2025-2026 - Fall, Winter
"Proprioception," often described as the human body's "6th sense," describes one's ability to know where their body is relative to itself without additional sensation. Proprioception has been proven to be a powerful predictor of the effectiveness of physical therapy, and further, that it is a trainable attribute. For patients recovering from strokes, measuring and training proprioception is a powerful new supplementary tool to use on the road to recovery. While there is one device (the Ankle Measuring Proprioceptive Device) capable of assessing and quantifying ankle proprioception, it is large and difficult to transport, preventing clinical viability. Prospective benefactors and/or test subjects are forced to come to where the device is located to assess and research ankle proprioception. The Portable Ankle Measuring Proprioceptive Device (PAMPD) is a smaller, lighter medical device meant to be brought to clinics to train and assess a patient’s ankle proprioception.
PoseMotive
2025-2026 - Fall, Winter
PoseMotive is a wearable posture-monitoring system designed to help users improve their posture and body language through continuous feedback and data analysis. The system consists of 5 inertial measurement unit (IMU) sensors embedded in a wearable garment that measure body orientation and motion. A microcontroller gathering all the data from these sensors and aggregating the information and forwards it to a web application via bluetooth. The application communicates to a backend system through wireless communication which processes the sensor data and classifies the user's posture into interpretable categories such as slouched, straight, leaning left, leaning right, and arm positioning such as open or closed. The overall goal of the project is to promote better ergonomic habits by helping users become aware of posture issues and correct them through consistent monitoring and feedback.

Preventing Vial Waste Using a Multi-Modal Edge Computing System
2025-2026 - Fall, Winter
This project addresses the need for fast and reliable defect detection in pharmaceutical manufacturing, where traditional inspection methods often rely on human oversight or cloud based processing that introduces latency and inconsistency. Defects such as micro cracks, improper sealing, or temperature anomalies in vials can compromise drug safety, leading to costly recalls and potential risks to patient health. By leveraging edge computing, the system performs real time, on device analysis that reduces latency while also lowering data transmission requirements and overall carbon footprint compared to cloud dependent approaches. This work directly impacts pharmaceutical manufacturers, quality assurance engineers, and ultimately patients who depend on safe and properly handled medications.

REX0: Dual Glove Stroke Therapy System
2025-2026 - Fall, Winter
Stroke survivors frequently experience upper-limb impairment, with 55–75% losing fine motor control, and recovery often plateaus within six months, highlighting the need for accessible, high-repetition rehabilitation tools. Because proprioception—the body’s sense of limb position and movement—is commonly impaired after stroke, improving it is critical for restoring hand function. This project addresses that need by developing REX0, a dual-glove wearable rehabilitation system that enables motion mimicry, allowing movements from a patient’s healthy hand to be replicated on the impaired hand for proprioceptive training. The system aims to improve long-term rehabilitation outcomes for stroke survivors who require effective and engaging therapy for hand motor recovery.
Rocker-Bogie Stair Climber
2025-2026 - Fall, Winter
Stairways are a fundamental barrier for autonomous ground vehicles. While wheeled robots excel on flat terrain, navigating multi-step staircases remains one of the most mechanically demanding challenges in mobile robotics. Team 28 set out to address this by designing and building a fully autonomous, six-wheeled stair-climbing robot capable of carrying a payload up the 19-step Engineering Gateway staircase at UC Irvine.
Our design utilizes the rocker-bogie suspension system, which is a solution first developed by NASA for their Mars Sojourner rover to maintain continuous wheel contact across uneven surfaces without the need for active stabilization. The project was driven by a practical need: demonstrating that a compact, low-cost ground vehicle can reliably navigate real-world stair environments, with potential applications in search and rescue, building inspection, and last-mile delivery in infrastructure-limited settings.

Scrappy
2025-2026 - Fall, Winter
Additive manufacturing has greatly improved rapid prototyping and small-scale production, but post-processing steps such as support removal, surface finishing, and print-bed cleaning remain largely manual and labor-intensive. These tasks introduce inefficiencies, inconsistencies in product quality, and potential safety risks due to exposure to chemicals like acetone used in vapor smoothing. Scrappy addresses this problem by developing a robotic system capable of automating these post-processing operations. By reducing manual labor and human exposure to hazardous materials, the project aims to improve safety, repeatability, and overall efficiency within additive manufacturing workflows.

SmartCan
2025-2026 - Fall, Winter
SmartCan is a smart sorting bin designed to identify and collect recyclable materials using computer vision. Improper waste disposal and low recycling rates contribute to environmental issues, while individuals with mobility limitations may face challenges in properly disposing of waste. This project addresses both concerns by creating an autonomous system that can detect recyclable objects and move toward them. By combining accessibility with sustainability, SmartCan aims to promote cleaner environments and make recycling more convenient for a wider range of users.
SmartSweat - Lactate Sweat Analyte Band
2025-2026 - Fall, Winter
According to an article by the American Chemical Society:
"Sports physiology will likely benefit from a technology able to account for high-resolution temporal lactate changes according to the intensity of the physical activity, rather than discrete information from centralized lab-based analysis.”
Lactate is a byproduct of muscular metabolism and an indicator of workout intensity. This market gap exists due to the difficulty in isolating and measuring specific chemicals in sweat, such as lactate. Currently, lactate sensors on the market are usually invasive and require lab analysis. This leaves a large market gap for non-invasive, real time lactate sensors, among athletes as well as the average consumer.
SmartSweat proposes an electrochemical lactate sensor working in combination with a mobile app to provide real-time lactate analysis on the user's sweat.
Software-Defined Phase Array Radar for Near-Range Drone Detection
2025-2026 - Fall, Winter
The signal strength necessary to identify small radar cross sections of miniature drones has resulted in most modern radars designed for this task being highly expensive and energy-intensive, rendering them impractical for use in an instructional setting and pushing university curricula to lean toward simulation as opposed to real-world testing. We are designing a cost-effective, energy-efficient phased array radar module using the ADALM-PLUTO software-defined radio (SDR), capable of detecting unmanned aerial vehicles (UAVs) at short to medium ranges. The proposed model may act as a replicable instructional platform for radar experimentation and a foundation for small-scale research in UAV detection and target classification.

Stair Climber Robot Final Prototype
2025-2026 - Fall, Winter
Stairs remain one of the biggest obstacles for mobile robots, limiting their usefulness in real world environments. While robots excel on flat surfaces, they struggle with the vertical challenge of staircases. Our project addresses this problem by designing a robot capable of quickly and reliably climbing the Engineering Gateway stairs at UC Irvine while transporting a standard 0.5L water bottle. The core challenge is balancing torque, traction, weight, and stability to achieve a controlled ascent without flipping or stalling. This matters because first responders need robots that can access upper floors in collapsed buildings. Delivery companies need robots that can reach front doors beyond ground level. Individuals with mobility impairments could benefit from assistive devices that navigate stairs in their own homes. Our specific task of climbing the Engineering Gateway stairs with a water bottle serves as a testbed for these broader applications. The problem we are tackling affects anyone...

StairForce One
2025-2026 - Fall, Winter
Current delivery devices and services are optimized for flat terrain and struggle with stair-like obstacles. StairForce One is a remotely operated tracked vehicle designed to transport small payloads up steep staircases without physical tethering. The system uses a dual-track drivetrain and distributed wheel and distributed gear support to maintain stability and traction while climbing. StairForce One successfully transported a 0.5 L (16.9 oz) water bottle up UCI Engineering Gateway stairway in less than 30 seconds with 50% power, demonstrating reliable ascent and remote operation. This project highlights the potential for compact stair-climbing vehicles in last-mile delivery, accessibility support, and emergency logistics.
SubSurface Systems: RC Submarine
2025-2026 - Fall, Winter
Most commercially available 1:18 scale RC boats are designed solely for surface operation, lacking the structural integrity, waterproofing, and buoyancy control needed for submersion. While RC submarines are available as niche hobbyist products, they tend to be expensive, specialized, and limited in depth capability. This project aims to bridge that gap by converting an off-the-shelf RC boat into a functional submarine, applying engineering principles to address challenges in waterproofing, ballast design, and underwater propulsion.
Synthesizer Blocks
2025-2026 - Fall, Winter
The project addresses the challenge of making analog signal processing and synthesizer operation accessible to beginners, since conventional synthesizers are often costly, highly complex, and difficult to interpret without prior technical knowledge. To address this, a modular educational system called Synthesizer Blocks was developed, in which individual signal-processing functions such as waveform generation, filtering, mixing, and amplitude modulation are implemented as physically interchangeable blocks. This architecture enables users to assemble signal chains while directly observing waveform changes through built-in test points, supporting a clearer understanding of electrical engineering fundamentals. The scope of the project included the design, fabrication, and validation of PCB-based functional modules capable of producing audible output while serving as a hands-on instructional platform for signal processing concepts.
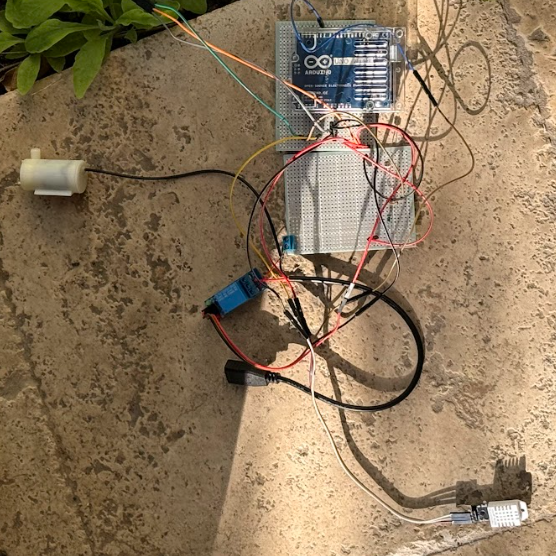
TeraFlow: An AI-based Autonomous Irrigation System
2025-2026 - Fall, Winter
Water scarcity and inefficient irrigation practices continue to pose challenges for agriculture and small-scale plant management, as traditional watering methods often rely on fixed schedules that fail to adapt to real environmental conditions. This project addresses the need for a smarter irrigation solution by developing TeraFlow, an autonomous irrigation system that integrates environmental sensors, IoT communication, and AI-based image analysis to make informed watering decisions. By collecting real-time data on soil moisture, temperature, humidity, and light conditions, the system helps users monitor plant environments and automatically control irrigation when necessary. The project matters because it promotes more efficient water usage and provides accessible tools for gardeners, small-scale growers, and plant caretakers who need reliable and data-driven irrigation management.
The Anteatairs
2025-2026 - Winter, Spring
A tiltrotor VTOL fixed-wing UAV engineered for search-and-rescue — currently undergoing airframe surface coating and final systems integration before flight testing.
The Mission
Modern search and rescue (SAR) operations face a critical tradeoff: ground teams are slow, and conventional fixed-wing aircraft require runway infrastructure that doesn't exist in disaster zones or remote terrain.
The Anteatairs solves this by engineering a tiltrotor VTOL UAV — a hybrid platform that takes off and lands vertically like a multirotor, then physically rotates its motors forward to transition into efficient fixed-wing cruise flight. No runway. No infrastructure dependency.
Built on a COTS fixed-wing airframe retrofitted with custom tiltrotor propulsion, with a scale fuselage modeled in Fusion 360, a purpose-designed payload delivery bay, FPV telemetry, and autonomous navigation — this platform is designed to rapidly deploy, survey large search areas, and deliver emergency first-aid supplies to survivors.
Project 9B is...

The BOOM Squad - Toy Ball Cannon
2025-2026 - Fall, Winter
The Toy Ball Cannon Project is a mechatronics-focused design that redefines recreational fun. The system launches lightweight projectiles using flywheel technology while coupling RGB-oriented object detection and navigation to track fast-moving targets. This project heavily involves collaborative design, research, prototyping, performance optimization, safety considerations, and extensive testing, allowing us to apply critical engineering principles in a dynamic way to meet our stakeholder needs and expectations.
Inspired by the Nerf Rival Nemesis blaster, our team aimed to create an autonomous turret that sprays a volley of balls to hit a moving target a minimum of one time per firing cycle.

The Guardian - Home Security System
2025-2026 - Fall, Winter
Home security remains a important concern for residents in the United States, with millions of residential burglaries reported each year, yet many existing security systems are expensive, complicated, or difficult to customize. Because of this, many households do not have access to reliable protection for their homes. The Guardian Home Security System addresses this problem by creating an affordable system that combines motion detection, camera monitoring, door locking, and fingerprint authentication into one easy-to-use platform. The Guardian shows how modern technology can make home security more accessible to everyday homeowners and renters who want a simple and effective way to monitor and protect their property.
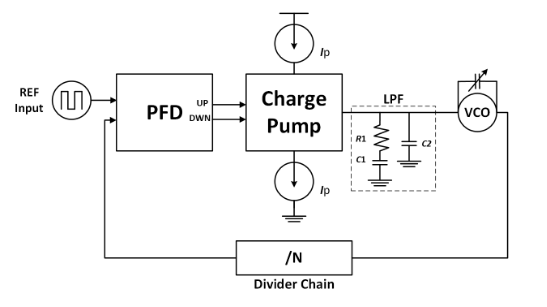
The Impact of VCO Coupling with Control Voltage on Spurs
2025-2026 - Fall, Winter
Phase locked loops are a critical component in modern communication, sensing, and imaging systems. While computer automated design tools allow for accurate simulation, they often take weeks of design and computing time. Our project's research intends to model a specific non-ideal performance of analog phase locked loops, previously not studied, as closed form equations. This allows designers to observe their system's performance in seconds, rather than weeks.
Toy Ball Cannon
2025-2026 - Fall, Winter
This project is designed by UCI MAE department with the goal of creating a cannon system with the ability to discern, track and shoot at RC cars. The system should be able to hit targets in a 360 degree area from a range of 5 - 15 feet, all while in a safe manner. The three step process is autonomous requiring humans only to power the system on and reload after firing. This project addresses the current inability of off the shelf cannon systems to discern the targets it is firing at, while providing a meaningful learning experience for UCI students.
UAV FORGE
2025-2026 - Fall, Winter, Spring
Background
UAV Forge constitutes a multidisciplinary engineering design team with a specific focus on the comprehensive development cycle of autonomous aerial vehicles, encompassing design, manufacturing, programming, and rigorous testing. The paramount objective of this design endeavor is to adhere to the stipulated constraints, thereby enabling active participation in the SUAS 2025-2026 competition season.
The SUAS competition mandates that the UAV system possesses autonomous flight capabilities, proficient object avoidance capabilities pertaining to both stationary and dynamic entities, and adeptness in object detection, localization, and classification. Furthermore, the system is required to execute an airdrop delivery mechanism, ensuring the precise delivery of a payload object to a designated GPS location without incurring any damage.
Goal and Objectives
While the immediate focus of this year’s team centers on achieving commendable performance within the competitive arena, the overarching goal is to provide undergraduate participants with a practical application of their engineering...
UCI CubeSat
2025-2026 - Fall, Winter, Spring
The CubeSat team at UCI is a student-led undergraduate interdisciplinary research and design project with the goal of launching a 2U nanosatellite, AntSat 01, into orbit to test a UCI research payload. The satellite operates with five main engineering subsystems: Avionics, Communications, Structures, Power, and Systems. They all work to house STMS's (Spacecraft Thermal Management Systems) research payload within the 2U nanosatellite.
The research payload is a variable emissivity device (VED) that is developed by Spacecraft Thermal Management Systems (STMS). The payload will be tested as a thermal regulator, and our task is to evaluate its performance under varying levels of solar exposure and at different adjustable emissivity settings. We aim to determine if materials similar to the sample can serve as an inexpensive method for thermal management on future spacecraft.
BACKGROUND:
In recent years, the space sector has undergone a significant transformation with the emergence of privatization. This shift...
Undercurrent: RC Boat to Submarine Phase 2
2025-2026 - Fall, Winter
This project addresses that gap by converting an off‑the‑shelf RC boat into a functional, depth‑capable submarine using readily available components, open‑source microcontrollers, and accessible design tools. The scope includes redesigning the hull to support waterproofing, integrating a ballast system for controlled diving, and developing a multi‑Arduino control architecture capable of managing pumps, sensors, and propulsion. SolidWorks is used to model structural modifications and 3D‑printed components, while ThinkerCad provides a virtual environment for simulating electrical circuits before physical assembly.
Commercial RC submarines and underwater robotics platforms are often expensive, limiting access for students, educators, and early‑stage researchers. By demonstrating that a functional, depth‑capable submarine can be built from an affordable RC boat and readily available components, this project lowers the financial barrier to hands‑on learning in marine engineering, robotics, and control systems.

VRTDrone - Hybrid VTOL Drone for Autonomous Sports Tracking
2025-2026 - Winter, Spring
The VRTDrone team has been tasked with designing, manufacturing, and implementing a vertical takeoff and landing (VTOL) capable of autonomous flight in urban and confined environments. This project looks to address a need for a small aerial system capable of operating safely and reliably in confined or urban environments and support sports object-tracking-related tasks with minimal burden imposed on the operator.
Analyzing sport gameplay often requires expensive tracking systems or manually operated cameras, limiting access for amateurs. As a result, many players and coaches lack affordable tools that can help to capture and analyze their respective sports during games and practices.
This drone could make game analysis much more accessible and efficient that currently possible helping users gain deeper insight into their matches. The primary groups affected include players, coaches, and analysts at an amateur level where professional tracking systems are often unavailable.
The scope of this...

Wheel of Deception
2025-2026 - Fall, Winter
The "Wheel of Deception" project, sponsored by Derek, addresses a gap in the professional entertainment market for compact, high-tech rigging hardware. Existing "off-the-shelf" rigged wheels are typically large, stationary floor units costing upwards of $10,000, making them difficult to transport and unsuitable for close-up environments like bar-top performances. The scope of this project was to engineer a portable, high-performance alternative that maintains all the functionality of a full-sized unit while fitting within a desktop footprint. This project matters because it provides a cost-effective, mobile solution for performers who require professional-grade mechanical deception in versatile, small-scale settings.

ZOT-ONOMOUS UAV Senior Design Project
2025-2026 - Winter, Spring
Zot-onomous is a Senior Design Project which centers on the systems engineering and design of an autonomous unmanned aerial vehicle (UAV). The scope of the work involves creating a student-built drone capable of vertical take-off, transitioned cruise, and a rapid descent maneuver for precise payload delivery. This project addresses the critical need for a safe and operable vehicle that can transport a 2 kg payload, to target locations with minimal damage. By utilizing advanced autonomy, the design aims to reduce human error while ensuring the consistency and repeatability required for modern aerial logistics. The project is significant both as a practical solution for stable flight under moderate weather conditions and as an educational tool for the team to incorporate industry-standard systems engineering processes and documentation to a streamlined product.
Zpotless
2025-2026 - Fall, Winter
Litter and debris accumulation in outdoor pedestrian areas poses significant environmental, aesthetic, and economic challenges, driving up municipal maintenance costs while degrading public spaces used by communities daily. Zpotless addresses this problem by designing a fully autonomous, solar-powered cleaning robot capable of detecting, retrieving, and storing trash in outdoor public spaces with minimal human intervention. The system is built to be entirely self-sustaining by leveraging photovoltaic (solar) energy, eliminating dependence on external power infrastructure and enabling extended operation. This project matters because it targets a recurring, labor-intensive problem that affects residents, pedestrians, and facility managers in both residential and urban commercial environments.