Steerable Mechanical Walking Robot

Background:
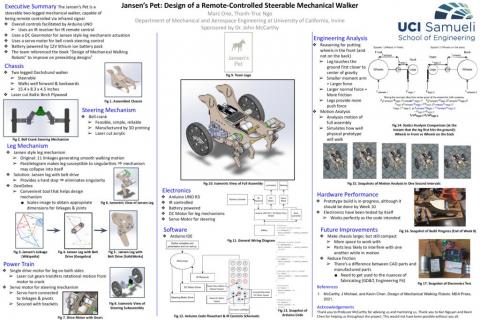
This project focuses on the design of mechanical walking robots that use the Jansen leg mechanism. During this project, we built and evaluated the performance of our walking machine. A CAD model was designed first to make sure the physical prototype will function properly when built by using the Motion Study tool on SolidWorks. The walker uses an Arduino UNO to control it, which receives an IR signal to drive the leg mechanisms and also to actuate the steering mechanism. The walker is made of manufactured parts made from laser cutting or 3D printing and with materials that were purchased online. A total of two walkers were designed and built with the second prototype working and the first prototype not working because its legs got locked up.
Goal and Objectives:
The goal of this project was to design, build, and physically demonstrate a two-legged steerable mechanical walker. The walker uses one motor to drive the Jansen leg mechanisms, while another motor facilitates the steering mechanism. The walker will be steerable via IR controls.
Two full prototypes representing the major milestones were made throughout the course of this project. The first prototype implements a belt drive into the Jansen leg mechanism, while the second prototype uses the original Jansen-style leg.
Additional Goals:
In designing our first prototype, we were told by Professor McCarthy to change our design so he can use it as an example for a future class. Our first design involved having the legs in front, and wheels on the back, having a steering hinge in the middle which turns the entire body of the robot.
The design that we changed it to has wheels on the front and legs on the back, using a bell crank steering mechanism which allows the walker to turn in both directions. While our current priority is to build this newer design, we may want to try building our first design for our second prototype.
Team Contact(s):
Marc Ono: marcko@uci.edu
Thanh-Truc Ngo: ngott8@uci.edu
Sponsor/Advisor:
Professor J. Michael McCarthy: jmmccart@uci.edu