
PDR: https://tinyurl.com/3skz59er
Background:
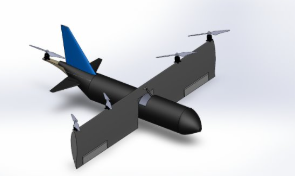
Conventional fixed-wing airplanes offer efficient forward flight but require runways, while multirotor drones enable vertical takeoff and landing (VTOL) but suffer from limited range and efficiency. A Tiltwing VTOL system combines the advantages of both, providing runway-independent operations with enhanced endurance and maneuverability. This project aims to design, build, and test a four-feet wingspan remotely controlled Tiltwing VTOL that achieves stable transitions between hover and forward flight.
Goals and Objectives:
-
19 minutes total flight time
- 2 minutes for hover take-off
- 15 minutes for cruise
- 2 minutes for hover landing
- Carry 1lb Payload
- Stable transitions
Team Contacts:
- Barozh Smail - bsmail@uci.edu
- Hambik Margoosian - hmargoos@uci.edu
- Riley Schuller - rschulle@uci.edu
- Connor Sessions - cjsessio@uci.edu
- Claire Greene - greenec1@uci.edu
- Arash Soroushiani - asoroush@uci.edu
Sponsor:
- Dorsa Shirazi - dorsa.shirazi@nasa.gov
Poster:
Course Department:
MAE
Term(s):
Winter
Spring
Academic Year:
2024-2025
Winter Poster:
Teammates: