
This project presents the design and implementation of an embedded autonomous navigation system featuring real-time ultrasonic radar visualization. Originally conceptualized as a Smart Digital Closet, the project's scope was strategically redefined to focus on a technically rigorous robotics platform capable of environmental scanning and autonomous decision-making. The system addresses the need for low-latency obstacle detection in mobile robotics by providing a 180 spatial awareness interface. This work is significant for developing accessible, real-time sensing solutions for autonomous indoor vehicles.
EECS
2025-2026
Winter
Internally Mentored (faculty, staff, TA)
Embedded Autonomous Navigation and Real-Time Radar Visualization System
Summary
Technical Approach/Methodology
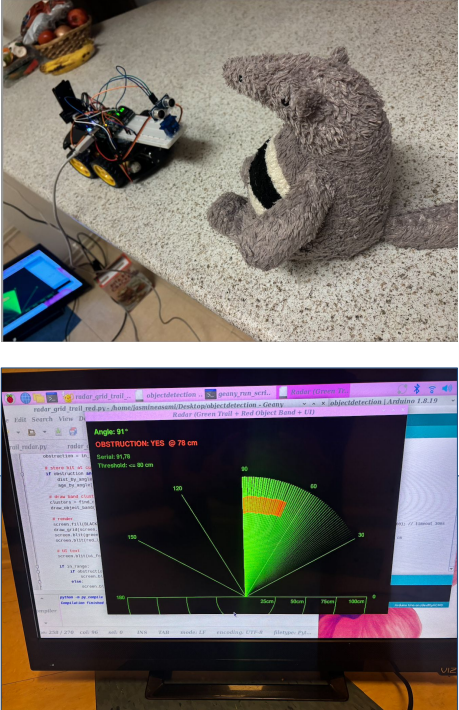
The system utilizes a synchronized perception-to-control architecture integrating an HC-SR04 ultrasonic sensor mounted on a SG90 servo motor for angular scanning. An Arduino Uno handles the embedded control pipeline, processing distance data and managing motor actuation via an L298N H-Bridge driver. Real-time data is transmitted via UART at 115200 bps to a Python-based GUI, which utilizes Pygame to render a polar radar sweep and plot detected objects. Closed-loop collision avoidance logic is implemented to trigger immediate maneuvers when obstacles enter a predefined 3 cm safety threshold.
Outcomes
The final prototype successfully achieved reliable obstacle detection within a 2-20 cm range with an average measurement error below 5%. Experimental testing demonstrated high-performance metrics, including an end-to-end response latency of less than 120 ms and an avoidance success rate exceeding 90% in controlled trials. Deliverables include a fully functional robotic vehicle, a real-time radar visualization software interface, and comprehensive technical documentation outlining the system's firmware and hardware integration.
Project Media
Project Video
Project Poster