
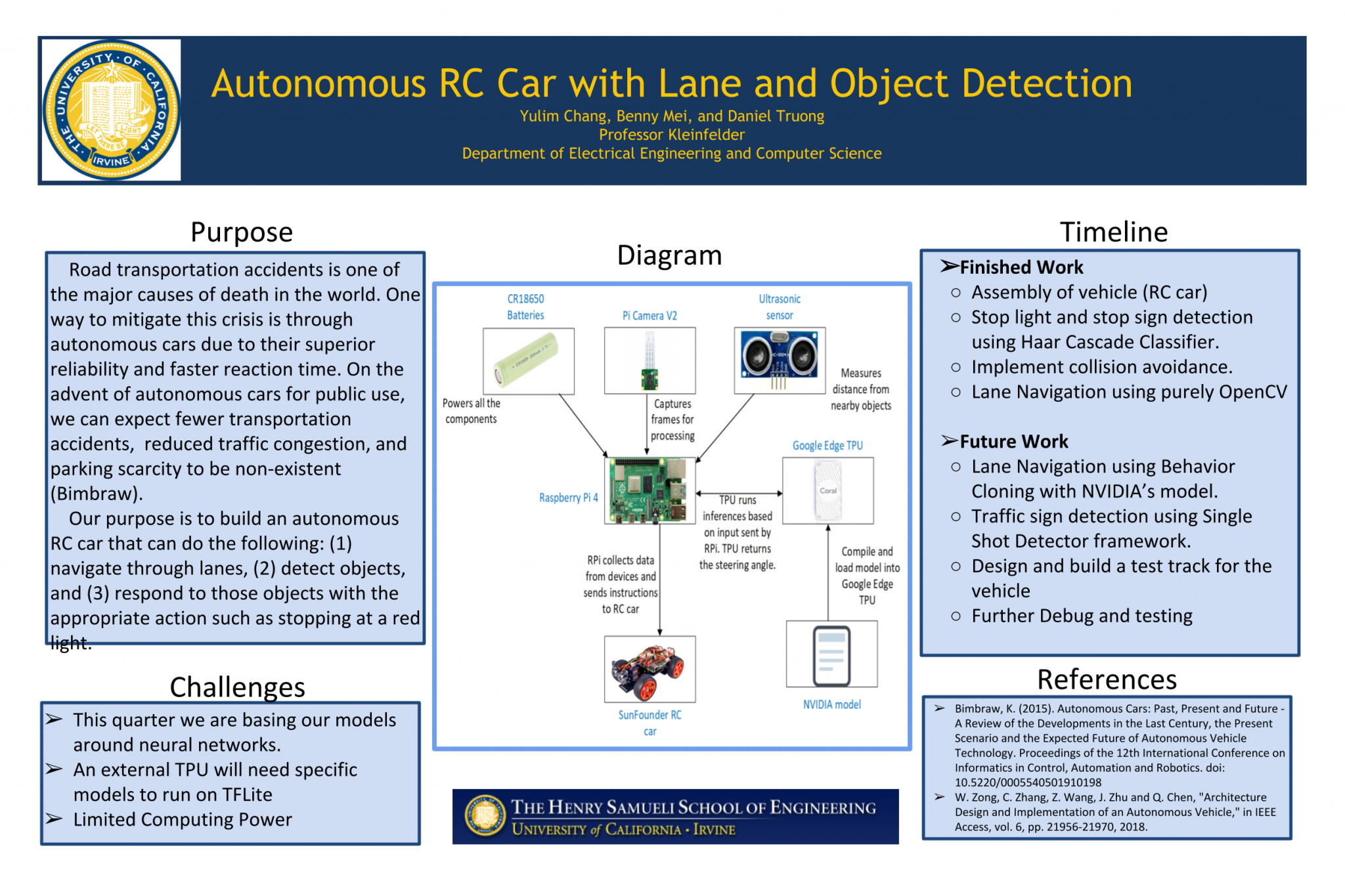
The purpose behind this project is to build an autonomous RC car that can do the following: (1) navigate through lanes, (2) detect objects, and (3) respond to those objects with the appropriate action such as stopping at a red light.
Course Department:
EECS
Term(s):
Fall
Winter
Academic Year:
2019-2020
Winter Poster:
Teammates:
Benny Mei
Yulim Chang