Intelligent Ground Vehicle
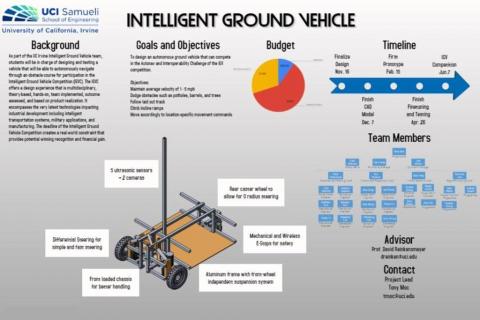
Background
As part of the UC Irvine Intelligent Ground Vehicle team, students will be in charge of designing and testing a vehicle that will be able to autonomously navigate through an obstacle course for participation in the Intelligent Ground Vehicle Competition (IGVC).
The IGVC offers a design experience that is multidisciplinary, theory-based, hands-on, team implemented, outcome assessed, and based on product realization. It encompasses the very latest technologies impacting industrial development including intelligent transportation systems, military applications, and manufacturing. The deadline of the Intelligent Ground Vehicle Competition creates a real-world constraint that provides potential winning recognition and financial gain.
Goal and Objectives
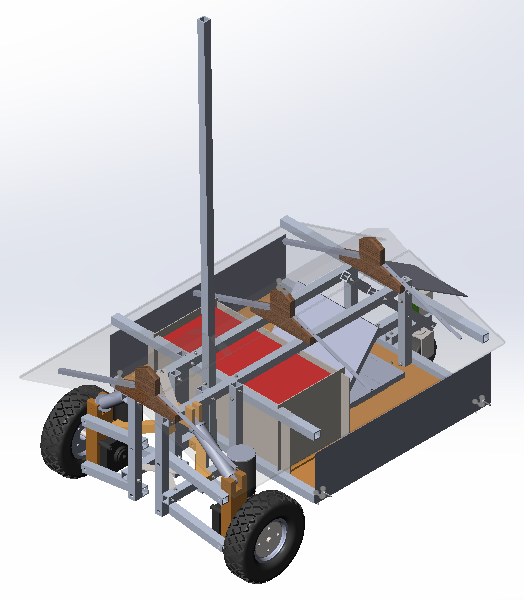
As a new project at UCI, our ultimate goal is to at least compete and perhaps win the rookie award for the 2019 Autonav Intelligent Ground Vehicle Competition. Our goal for this project is to create a 2.5’ x 3.5’ x 6’ ground vehicle that can complete a 600 ft course at a speed between 2-3 mph. The goal is to ensure that the cameras are given an optimal field of view from as high as the parameters allow so that the vehicle can move seamlessly through any sort of obstacle by clearly detecting them. The chassis is required to be lightweight and balanced to reduce disturbances, ensuring a slightly front-loaded design supported by an independent suspension system that can operate on a 12mm axle. The project itself must also be cost and weight efficient, roughly under $6,000 and weighing below 100 lbs (includes the weight of the payload), while also being durable and rigid enough that it has feasible application in a real setting.
Contacts
Faculty Advisor(s): Prof. David J. Reinkensmeyer, dreinken@uci.edu
Student Contact(s): Tony Moc, tmoc@uci.edu