
Efficient Deep Racing via Environmental Constraining
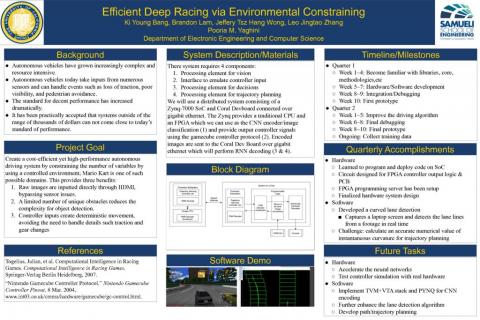
Our project is called efficient deep racing via environmental contraining, our goal is to create a cost efficient yet high performance autonomous driving system by limiting the variables needed to process through using mario kart as the environment.
Project status:
Active
Department:
EECS
Term:
Fall
Winter
Academic year:
2019-2020
Fall Poster:
Fall Video: