
The capstone projects in the Department of Electrical Engineering and Computer Science is run by "faculty member name". Need to add more content specific to EECS.






UAV FORGE
Background
UAV Forge constitutes a multidisciplinary engineering design team with a specific focus on the comprehensive development cycle of autonomous aerial vehicles, encompassing design, manufacturing, programming, and rigorous testing. The paramount objective of this design endeavor is to adhere to the stipulated constraints, thereby enabling active participation in the SUAS 2025-2026 competition season.
The SUAS competition mandates that the UAV system possesses autonomous flight capabilities, proficient object avoidance capabilities pertaining to both stationary and dynamic entities, and adeptness in object detection, localization, and classification. Furthermore, the system is required to execute an airdrop delivery mechanism, ensuring the precise delivery of a payload object to a designated GPS location without incurring any damage.
Goal and Objectives
While the immediate focus of this year’s team centers on achieving commendable performance within the competitive arena, the overarching goal is to provide undergraduate participants with a practical application of their engineering...
ZotQuatics

About Us
The UC Irvine ZotQuatics team works towards designing and manufacturing an Autonomous Underwater Vehicle (AUV) to compete in the annual RoboSub Competition hosted by RoboNation. Teams from around the world come together to test their AUVs through a series of underwater objectives and present their work through technical documentation. Our AUV will also have applications in environmental remediation.
Our ultimate goal for 2024-25 is to establish ZotQuatics as a permanent pillar of the UCI Engineering community. We will do this by designing and fabricating Mark I of the ZotQuatics AUV as a platform for future teams to build off on and evolve. The Mark I shall adhere to RoboSub regulations regarding functionality, performance, constraints, and design attributes we identify to meet these requirements.
ZotCart Autonomous Golf Cart

ZotCart is a fully autonomous golf cart that will be roaming around Ring Road in the near future. This is achieved by designing drive, brake and steer by wire mechanisms to allow for autonomous control of the golf cart, with the ability for a human to take control in case of an emergency. Several sensors such as cameras, radars, and IMUs along with control algorithms will allow for autonomous driving around static obstacles.
As of now, there are many different ways to get around campus such as by walking, scooter, or bike. However, these all require investment whether it be in the form of money or time. ZotCart allows for multiple people to enjoy quick transport all around campus, all while allowing a comfortable ride and an opportunity to get some extra work done due to the autonomous nature of the vehicle.
We aim to have a functional vehicle roaming...
Semiconductor Chip Design and Fabrication
Background:
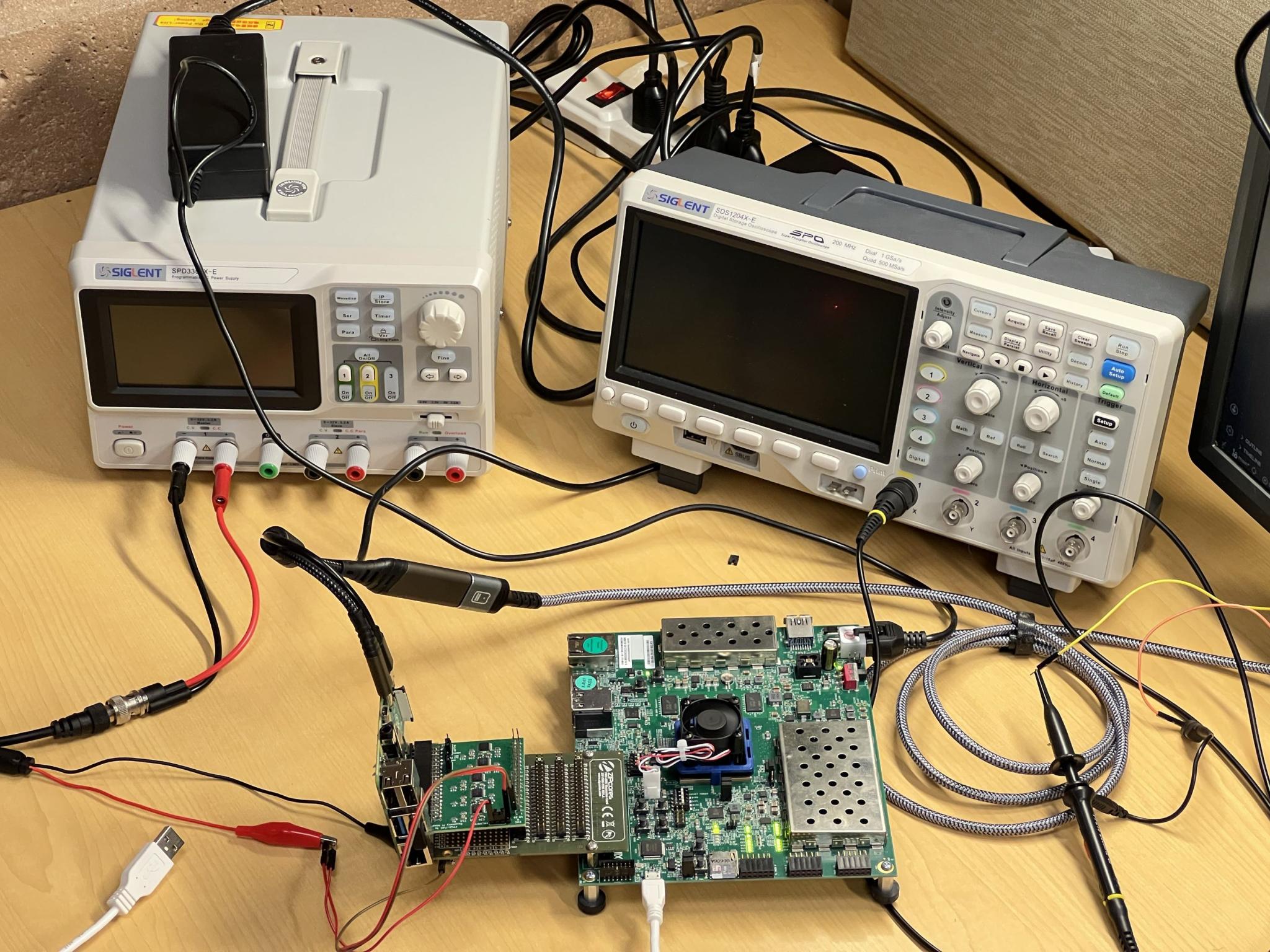
Our multidisciplinary team is working to design and fabricate a semiconductor chip through the use of a cleanroom and the equipment within it. In addition to development, the team aims to create educational content on semiconductor manufacturing to share knowledge and promote understanding. By combining the expertise of multiple engineering fields, in mechanical, electrical, and computer, we are working together to understand the processes and theories behind devices smaller than a millimeter.
Goal and Objectives:
- design electrical components including resistor, capacitors, inductors and transistors with a tolerance of 25 um
- fabricate a semiconductor chip on a wafer
- comprehensive documentation for each stage of the design and fabrication process
- comprehensive guide to using KLayout CAD software for chip design
- standard operating procedure for cleanroom environment
Team Members:
Mufan Zhang, mufanz@uci.edu
Simon Chang, simonc7@uci.edu
Raghav Gate
Kenny...
UAV FORGE

UAV Forge constitutes a multidisciplinary engineering design team with a specific focus on the comprehensive development cycle of autonomous aerial vehicles, encompassing design, manufacturing, programming, and rigorous testing. The paramount objective of this design endeavor is to adhere to the stipulated constraints, thereby enabling active participation in the SUAS 2024-2025 competition season.
The SUAS competition mandates that the UAV system possesses autonomous flight capabilities, proficient object avoidance capabilities pertaining to both stationary and dynamic entities, and adeptness in object detection, localization, and classification. Furthermore, the system is required to execute an airdrop delivery mechanism, ensuring the precise delivery of a payload object to a designated GPS location without incurring any damage.
While the immediate focus of this year’s team centers on achieving commendable performance within the competitive arena, the overarching goal is to provide undergraduate participants with a practical application of their engineering acumen toward a consequential real-world challenge. UAV Forge’s...
Cargo Plane 2023-2024
Spanning several years, UCI Cargo Plane is a well-renowned project at the University of California, Irvine. This project provides a great opportunity for undergraduate and graduate students to learn the fundamentals of aircraft design, as it brings together the foundations of aerospace engineering and combines it with hands-on manufacturing experience. In our specific case, members of the UCI Cargo Plane team will learn how to design a plane that carries metal weights. These skills will aid these members in future endeavors where they may design planes that could potentially carry more precious cargo.
Given the formidable challenge by SAE, teams are expected to bring together unique perspectives in creating a one of a kind RC aircraft, capable of meeting all constraints. These constraints include power limiters and limited wingspan. Additionally, the Aero Design West Competition takes the common practice of RC aircraft competitions and raises the level of complexity, requiring...
UAV FORGE

UAV Forge constitutes a multidisciplinary engineering design team with a specific focus on the comprehensive development cycle of autonomous aerial vehicles, encompassing design, manufacturing, programming, and rigorous testing. The paramount objective of this design endeavor is to adhere to the stipulated constraints, thereby enabling active participation in the SUAS 2023-2024 competition season.
The SUAS competition mandates that the UAV system possess autonomous flight capabilities, proficient object avoidance capabilities pertaining to both stationary and dynamic entities, and adeptness in object detection, localization, and classification. Furthermore, the system is required to execute an airdrop delivery mechanism, ensuring the precise delivery of a payload object to a designated GPS location without incurring any damage.
While the immediate focus of this year’s team centers on achieving commendable performance within the competitive arena, the overarching goal is to provide undergraduate participants with a practical application of their engineering acumen toward a consequential real-world challenge. UAV...
UCI CubeSat
The CubeSat team at UCI is a student-led undergraduate interdisciplinary research and design project with the goal of launching a 2U nanosatellite, AntSat 01, into orbit to test a UCI research payload. The satellite operates with five main engineering subsystems: Avionics, Communications, Structures, Power, and Systems. They all work to house STMS's (Spacecraft Thermal Management Systems) research payload within the 2U nanosatellite.
The research payload is a variable emissivity device (VED) that is developed by Spacecraft Thermal Management Systems (STMS). The payload will be tested as a thermal regulator, and our task is to evaluate its performance under varying levels of solar exposure and at different adjustable emissivity settings. We aim to determine if materials similar to the sample can serve as an inexpensive method for thermal management on future spacecraft.
BACKGROUND:
In recent years, the space sector has undergone a significant transformation with the emergence of privatization. This shift...
UAV FORGE

Project Description:
UAV Forge is a multidisciplinary engineering design team focusing on designing, manufacturing, programming, and testing autonomous aerial vehicles. The design aims to fulfill the constraints that allow the team to participate in the AUVSI SUAS 2023 competition season.
The AUVSI competition requires that the system’s UAV have autonomous flight capabilities, the ability to perform object avoidance of stationary and dynamic objects, and the ability to do object detection, localization, and classification. The system must also perform an airdrop task wherein UAV Forge will manufacture an assembly that will interface the UAV with descent and autonomous ground vehicles.
AUVSI SUAS Competition:
The ground vehicle, once landed, will autonomously drive to its set destination to complete payload delivery. Though the emphasis for this year’s team is to perform well in the competition setting, the primary objective is to ensure the undergraduate students participating in the project apply their engineering skills...
UAV Forge MAE 189 (Spring 2023)

Background
“The SUAS competition is designed to foster interest in Unmanned Aerial Systems (UAS), stimulate interest in UAS technologies and careers, and to engage students in a challenging mission. The competition requires students to design, integrate, report on, and demonstrate a UAS capable of autonomous flight and navigation, remote sensing via onboard payload sensors, and execution of a specific set of tasks. The competition has been held annually since 2002.
Multiple package delivery companies have tasked Unmanned Aerial System (UAS) to deliver packages to customers. These UAS must avoid each other, map the operating area to identify hazards, avoid static obstacles like buildings, identify potential drop locations, drop the package to a safe location, and then move the package to the customer.” - SUAS 2023 Rulebook
Goal and Objectives
The team goal is to have a successful fixed-wing aircraft with respect to a mission profile that can potentially be used...
FUSION Engineering Project: Team Peter's Anteaters

In this project, we will be creating an autonomous cleaning robot that resembles the form of a Roomba. Upon completion, our cleaning robot will go through a challenging obstacle course where it will need to avoid obstacles while simultaneously vacuuming up dust and debris in the play field. Through this project, we are synthesisizing several disciplines of engineering including mechanical, robotics, electrical and computer engineering in order to accomplish our goal.
UCI CubeSat

BACKGROUND:
UCI CubeSat is a student-led effort to design, manufacture, and launch a 2U nanosatellite to conduct experiments on a UCI research payload called a variable emissivity device (VED).
These experiments aim to ascertain whether the VED will be viable for use as a cheap, reliable method of thermal management on future spacecraft. UCI's CubeSat, AntSat1, will relay data on performance in various degrees of solar exposure and at varying adjustable emissivity values while in orbit.
OBJECTIVES:
- Ensure that payload requirements and mission objectives from payload stakeholders are met
- Integrate components of various subsystems to collect data, manage power, and communicate with the ground station
- Build and test a functional receiving ground station
- Test the subsystems and CubeSat among operational and launch conditions
- Integrate and successfully launch AntSat1
- Create thorough documentation and a foundation for future UCI orbital projects
SUBSYSTEMS:
Operations: Maintains the team's Linux server (system administration) and internal...
FUSION Engineering Project: Autonomous Vacuum (Team Oompa Loompa Broombas)

The objective of the FUSION Engineering Project is to design and create a functional autonomous vacuum cleaner. Each team must adhere to certain design specifications set by the Project Directors and will compete with each other at FUSIONCon in May 2023. Each team’s goal is to create a cost-effective robot while maintaining functionality.
FUSION Engineering Project: Autonomous Vacuum (Team swiffer diss track)

Background:
The FUSION Autonomous Vaccum project aims to provide members with the opportunity to work with a diverse range of other engineering majors while aquiring hands-on experience with Arduinos and CAD modeling.Although we share the same objective as the other project teams within FUSION, we will differentiate ourselves with our unique design and approach to problem-solving in order to be a competitive oponent in the end-of-the-year competition.
Goal and Objectives:
This project will introduce us to the intricate world of robotics, allowing our members to explore their interests and curiosities in programming and modeling. This will allow us to better understand the complexity of automation and its potential to better our own lives.
We have received our first purchase order on Janurary 31st, 2023, and have began to work on initial construction of our robot. We have created designs for the major mechanical components of the system and have collaborated towards...
UAV Forge

UAV Forge is a multidisciplinary engineering design team that focuses on the design, manufacturing, programming and testing of autonomous aerial vehicles. The design aims to fulfill the constraints that allows the team to participate in the AUVSI SUAS 2021-2022 competition season. The AUVSI competition requires that the system’s UAV have autonomous flight capabilities, ability to perform object avoidance of stationary and dynamic objects, the ability to do object detection, localization, and classification. The system must also perform an airdrop task wherein UAV Forge will be manufacturing an assembly that will allow the UAV to drop payloads that safely land on designated targets. Though the emphasis for this year’s team is to perform well in the competition setting, the primary objective is to ensure the undergraduate students participating in the project apply their engineering skills to a compelling real-world problem.
UCI CubeSat

The CubeSat team at UCI is a student-led effort to launch a 2U nanosatellite into orbit to test two UCI research payloads. The satellite operates with five subsystems (Power/Payload, Communications, Avionics, Structures/Thermal, and Systems Engineering), in addition to housing two payloads.
BACKGROUND:
The first payload is a variable emissivity device (VED) that will be tested as a thermal regulator, and our job is to test its performance in various degrees of solar exposure and at varying adjustable emissivity values. Similar materials to the sample are hoped to be used as a cheap method of thermal management on future spacecraft. The second payload is in collaboration with the ASPIN lab at UCI. The satellite will carry a transceiver meant to function as a transmitter of a “signal of opportunity”, helpful in researching novel navigation methods in the absence of or in place of a traditional GPS signal.
OBJECTIVES:
- Ensure that payload requirements ...
UCI Intelligent Ground Vehicle W22
Background
Students that are a part of the UC Irvine Intelligent Ground Vehicle Team will design and test an autonomous ground vehicle that is able to navigate through an obstacle course. The technologies used in IGV encompass a wide range of applications in engineering including military mobility, intelligent transport systems, and manufacturing.
Goals and Objectives
The goal for students in IGV is to implement skills gained in classes while designing the vehicle and developing a method to allow it to navigate through the obstacle course. This includes usage of Finite State Machines, Ultrasonic and GPS Sensors, and microcontrollers.
Currently, the project is in the optimization stage. The chassis has been built and the obstacle detection code, GPS, and navigation systems are nearly complete. The next steps are to reconstruct the chassis using a more flexible material as the plexiglass was very unwieldy. Furthermore, we plan to optimize the lane detection...
UCI CubeSat
UCI CubeSat is a student design team working on the design and construction of UCI's very first CubeSat satellite. Our mission is to deliver two research payloads to low earth orbit.
Anteater Formula Racing (FSAE Internal Combustion Engine) 2021-22

Background:
Each year, Anteater Formula Racing designs, manufactures, tests, and competes with an open-wheel car modeled after Formula 1 racecars. Formula SAE (Society of Automotive Engineers) is an international organization that puts on competitions worldwide every year. There are dynamic components that involve racing the car itself, and static components that revolve around testing students knowledge of the engineering design process and business tactics. This year, the team will be working on the newest iteration of the car, named "Peter the Pavement Eater" or, PPE for short.
The team of 45 students participate in the design, manufacturing and testing phases to gain the engineering skills needed for industry in a highly-technical, fast-paced and competitive environment. The team collectively spends over 15,000 hours each year developing the car and its subsystems while balancing their engineering coursework.
Engineering students earn jobs in several industries, including automotive, aerospace, electrical, software and more, because of the hands-on training and...
UCI Intelligent Ground Vehicle 2021
Background
Students that are a part of the UC Irvine Intelligent Ground Vehicle Team will design and test an autonomous ground vehicle that is able to navigate through an obstacle course. The technologies used in IGV encompass a wide range of applications in engineering including military mobility, intelligent transport systems, and manufacturing.
Goals and Objectives
The goal for students in IGV is to implement skills gained in classes while designing the vehicle and developing a method to allow it to navigate through the obstacle course. This includes usage of Finite State Machines, Ultrasonic and GPS Sensors, and microcontrollers.
Currently, the project is in the optimization stage. The chassis has been built and the obstacle detection code, GPS, and navigation systems are nearly complete. The next steps are to reconstruct the chassis using a more flexible material as the plexiglass was very unwieldy. Furthermore, we plan to optimize the lane detection...
UCI CanSat / AntSat

The CanSat competition is a design-build-fly competition that provides teams with an opportunity to experience the design life-cycle of an aerospace system. The CanSat competition is designed to reflect a typical aerospace program on a small scale and includes all aspects of an aerospace program from the preliminary design review to post mission review. The mission and its requirements are designed to reflect various aspects of real world missions including telemetry requirements, communications, and autonomous operations. Each team is scored throughout the competition on real-world deliverables such as schedules, design review presentations, and demonstration flights.