
Buoyancy Engine CAN Communications (BECAN) is a user-controlled buoyancy engine designed to regulate the depth of a buoyant platform in aquatic environments. Precise depth control remains a significant engineering challenge for applications such as autonomous underwater vehicle docking and environmental monitoring. BECAN addresses this need by enabling controlled adjustment of system buoyancy through regulated water intake and release. This system provides a potential solution for industries and environmental agencies that require reliable underwater positioning and adaptive response to changing conditions.
EECS
2025-2026
Fall
Winter
Industry Sponsored
Buoyancy Engine CAN Communications (BECAN)
Summary
Technical Approach/Methodology
BECAN integrates mechanical, electrical, and software subsystems to implement closed-loop buoyancy control. A motor-driven pump and electrically actuated solenoid valve regulate water flow, while sensors monitor internal pressure and overall system health. Two ESP32 microcontrollers communicate over a CAN bus to process user commands and transmit telemetry data between subsystems. A proportional control algorithm modulates motor speed using pulse-width modulation (PWM) based on the error between the target and estimated system weight, enabling controlled and stable system response.
Outcomes
The project resulted in a fully integrated prototype capable of closed-loop command-to-weight control via CAN communication. Bench testing demonstrated accurate tracking of user-defined weight setpoints with less than 1.7% steady-state error. A complete system consisting of the mechanical assembly, embedded control firmware, CAN-based user interface, and power electronics was successfully designed and validated. While full in-water testing was limited, preliminary testing confirmed the system’s ability to modify buoyancy, demonstrating progress toward a deployable depth-control solution.
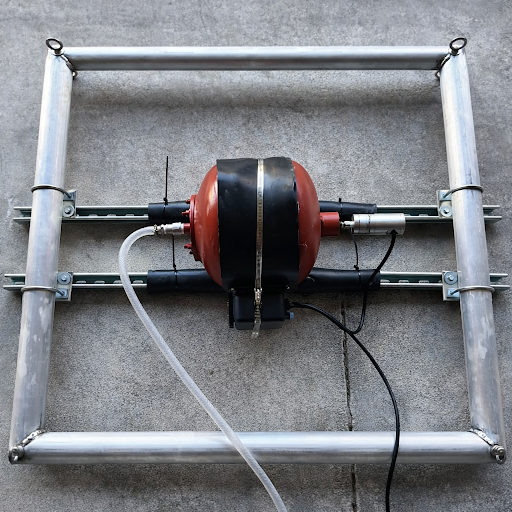
Project Media
Project Poster