
Background:
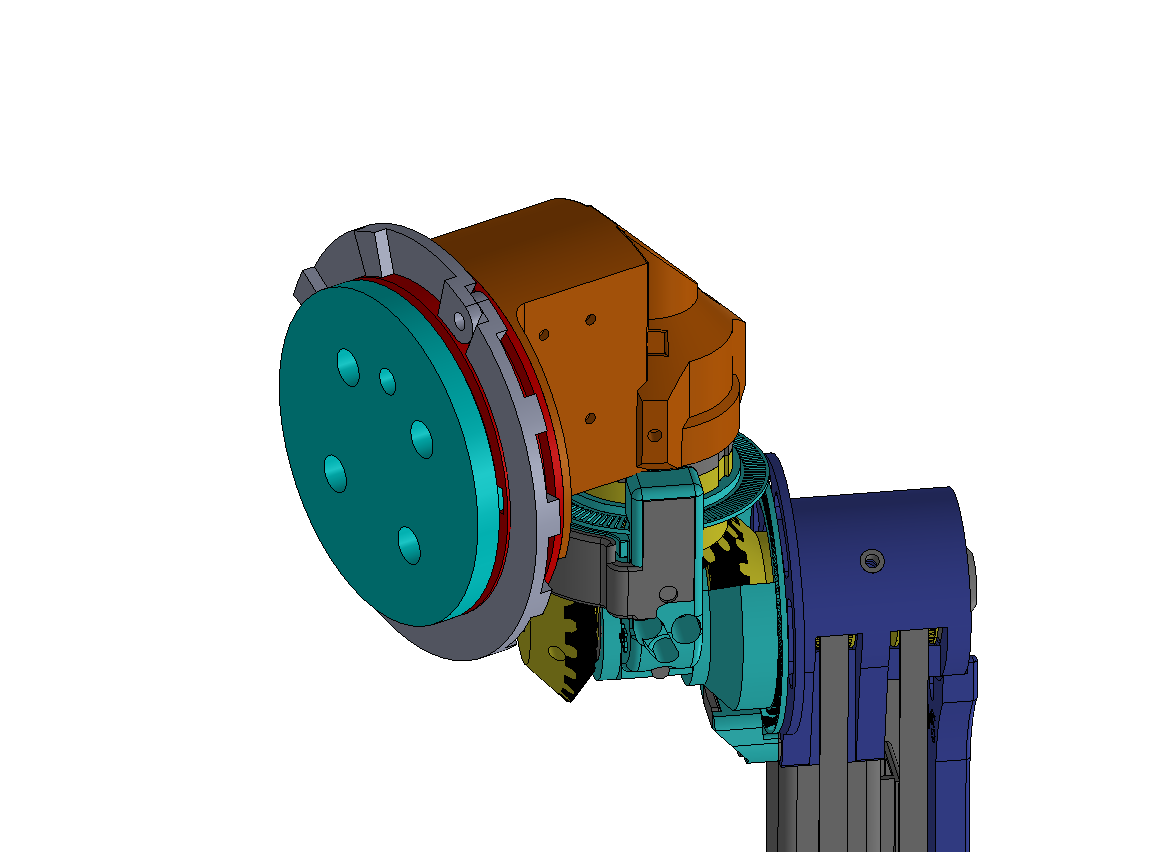
Archytas is a startup company specializing in selling robotic arms with a goal to bring automation to smaller scale companies locally. Archytas’s robotic arm is mostly created out of 3D printed parts made from Onyx, a carbon fiber nylon filament, and they are able to sell their arms for significantly less than current industrial arms. Their current design requires the user to take off both the “wrist” joint and the actual tooling or the “fingers” of the arm in order to swap EOAT along with only being able to use their own custom tooling. Our project aims to decrease the swap time by only requiring the tool to be swapped instead of the “wrist” and the tool, and create an interface that will allow Archytas to use 3rd party EOAT.
Goal and Objectives:
Our current goal is to redesign the current interface to:
-
Be able to be securely mounted onto the robotic arm
-
Function with an EOAT holding a 1kg payload
-
Improve swap time for EOAT
-
Allow for 3rd part EOAT from UR3e
-
Be able to work with all current Archytas robotic arms
-
Modify the assembly to incorporate a new motor
-
Make easy to produce by being comprised of 3D printable parts other than common fasteners
Milestones:
-
First CAD Assembly (11/24/23)
-
First Physical Prototype (11/30/23)
-
Locking mechanism created and verified (01/21/24)
-
Create prototype with all required functions (02/04/24)
-
Adapt gripper to work with our interface (03/08/24)
-
Finalize assembly and physical and electrical connections (03/15/24)
-
Final Design Binder with Documentation (03/22/24)
Documentation:
More documentation about our project can be found in our Google Drive.
Team Contacts:
Edmund Feng — edmundf@uci.edu
Nathan Alson — alsonn@uci.edu
Derek Fan — fand3@uci.edu
Alexander De Santiago — aedesant@uci.edu
Sponsor/Advisor:
Robert Caswelch — bobby.c@archytasinc.com