
Steerable Mechanical Walker

Goals & Objectives:
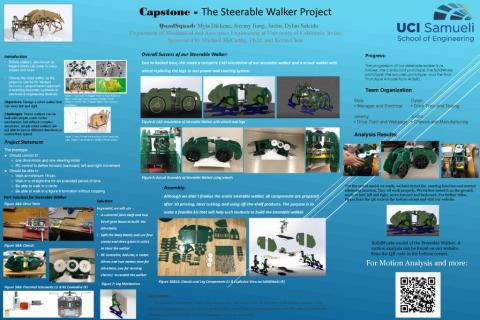
The goal of this project to design, build, and test a steerable mechanical walker.
Requirements: (i) one drive motor and one steering motor, (ii) RC control to define forward and backward movement and left and right turn to steer, (iii) four or six-legged design, though six-legged is preferred. (iv) a demonstration of its movement around a circle or in figure-eight in both directions.
Contact Infomation:
Myis Dickens, Project Manager, Fall 2020 -
Advisor:
Professor J. Michael McCarthy, jmmccart@uci.edu
Kevin Chen, kevinc15@uci.edu
Project status:
Active
Department:
MAE
Term:
Fall
Academic year:
2020-2021
Fall Poster:
Fall Video:
Teammate:
Justin Lin
Myis Dickens
Dylan Salcido
Jeremy Jiang
Attachment: