Providing Joint on Robotic Arm 360 Degrees of Freedom

Background:
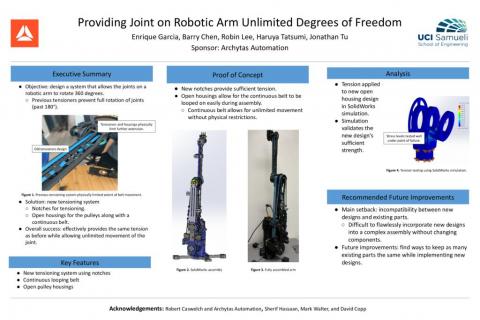
Working with industrial robotic arm manufacturer, Archytas Automation, this project aims to provide the last two joints on a robotic arm with unlimited degrees of freedom for unrestricted movement. The mostly 3D printed robot employs a system of base-mounted motors, and a pulley and belts system to translate movement to its 5 joints. The last two joints are responsible for the rotational and swivel motion of attachments placed at the end of the arm. Previously, non-continuous belts utilized tensioners to connect their ends. This led to restriction of movement as these could not pass through the pulley gears. By redesigning the gear housings to a more open design and implementing a new tensioning system, we can integrate continuous belts and provide unrestricted movement on joints 4 and 5.
Goal and Objectives:
The objective of the project is to alter the design of the Archytas robotic arm to allow for 360 degrees of rotation at the end of the robotic arm (Joint 4 and 5)
Project Timeline:
Problem Definition - 10/26/2023
Preliminary Design - 11/09/2023
Proof of Concept - 12/07/2023
Problem Definition - 01/17/2024
Critical Design Review - 01/29/2024
Prototype B Presentation - 02/28/2024
Annual Design Review - 03/15/2024 (Projected)
Team Contacts:
Enrique Martinez | enriqag1@uci.edu
Sponsor/Advisor:
Bobby Caswelch | bobby.c@archytasinc.com