LiDAR Vision

Background
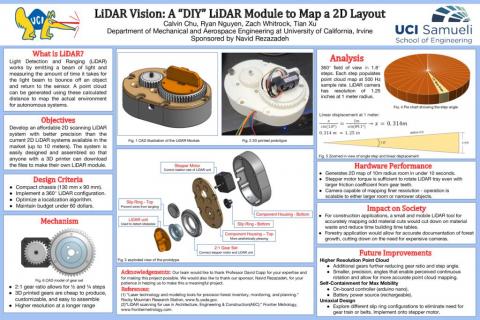
LIDAR systems are becoming more prevalent in the development of robotics and automated systems. However, current offerings of LIDAR modules are extremely expensive, particularly 2D scanning LiDAR, hindering potential innovation. The reason for this is because high-end 2D scanning LIDAR requires high electromechanical precision so that the sensor can collect data quickly and precisely. Cheaper 2D LiDAR is available but generally sacrifices precision. Our project aims to develop a 2D scanning LiDAR system that utilizes a one-dimensional LiDAR module that can scan two-dimensionally with equal or better precision than current 2D LIDAR systems available while keeping the cost of the total system under $60.
Goals/Objectives
- Design a compact chassis
- Implement a 360-degree LiDAR configuration
- Optimize a localization algorithm
- Maintain budget ~$60
- Deliver a functional LiDAR system by the end of Fall quarter 2021
Concept Design
https://docs.google.com/document/d/1Av-n9q9k0YS0TrN1JPxpwcaaZ9e02smivxT8qZOStw0/edit?usp=sharing
Team Contacts
Calvin Chu cychu2@uci.edu
Ryan Nguyen ringuyen@uci.edu
Tian Xu xut5@uci.edu
Zach Whitrock zwhitroc@uci.edu
Advisor
Navid Rezazadeh nrezazad@uci.edu