
Origami Structured Vascular Anastomosis Surgery Robot
Summary
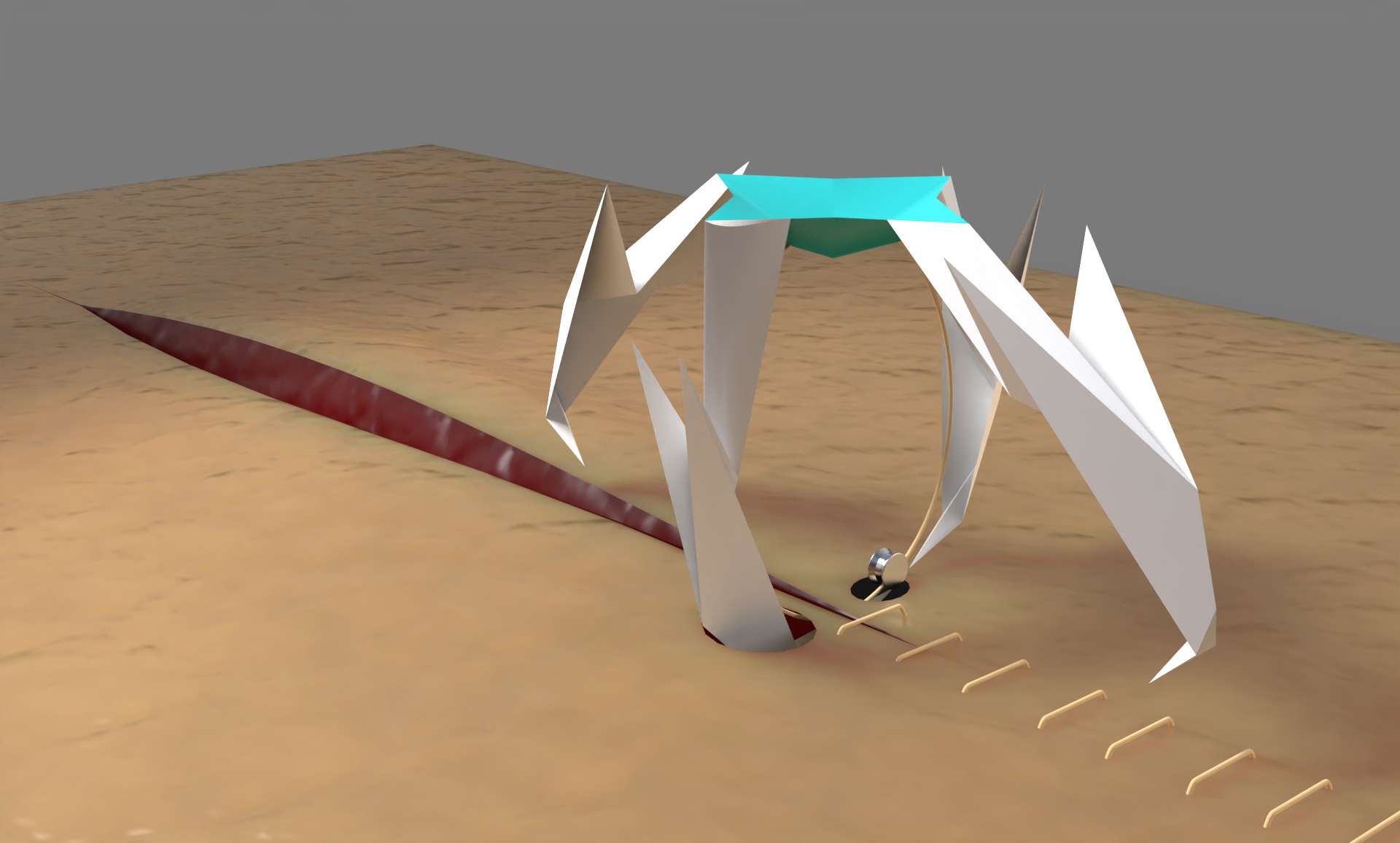
For this project, we aim to design a robot with the ability to fold and maneuver four legs while being equipped with the tools necessary to perform a suture. This device aims to streamline the suturing process by reducing human errors and labor through robotic technology. In the event of an accident, there are many risks and time delays associated with manual treatment during a patient’s access to treatment. Modern medical devices are well equipped to deal with such issues but can be expensive and difficult to access.
Background
The goal of Origami Robot is to design a robot that integrates the principles of origami folding with robotics technology to create a compact, flexible, and minimally invasive surgical tool. The purpose of the robot is to assist in life saving procedures that may be difficult to perform by hand or require advanced medical tools that are not readily available.
Goal and Objectives
The goal of Origami Robot is to design a robot that integrates the principles of origami folding with robotics technology to create a compact, flexible, and minimally invasive surgical tool. The purpose of the robot is to assist in life-saving procedures that may be difficult to perform by hand or require advanced medical tools that are not readily available.
Objective:
1. Motion: the robot needs to be able to move
2. The robot only has the ability to complete suturing for vascular anastomosis procedures in artificial skin(4 stitches).
Establish mechanical structure.(01.07.2024),
Find a way to drive the robot (01.11.2024)
Build the control system and electrical system.(02.05.2024)
Assemble the prototype model. (02.08.2024)
Prototype testing: range of motion & force(week 5), deformable of shape of the robot (week 6), strength of stitching(02.22.2024),
Functionality tests of suture process.(03.07.2024)
Team Contact
Shuyang Li: shuyanl6@uci.edu
Yu Guo: yguo14@uci.edu
Vinh Nguyen: vinhn7@uci.edu
Rio Seng: rcsemg@uci.edu
Bowen Xue: bxue4@uci.edu
Zhifeng Zheng: zhifenz2@uci.edu
Sponsor/Advisor
John McCarthy: jmmcart@uci.edu
Alexandra Voloshina: avoloshi@uci.edu
Mark Walter: m.walter@uci.edu
