Inertial Compensation Unit - Conservation of Momentum Gimbal
Background
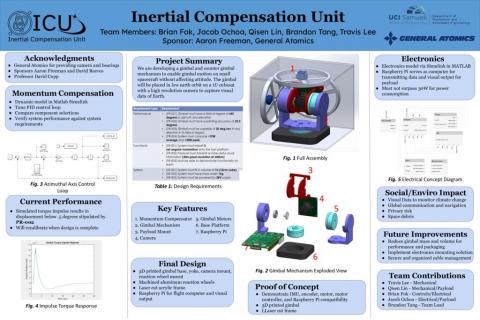
In order for satellites in orbit to maintain its heading to Earth, they utilize gimbals. Gimbals stabilize the payload which allow it to consistently point in the same direction even in motion. ICU is a MAE 151A/B project team in which we are developing a gimbal and counter gimbal mechanism to enable gimbal motion on small spacecraft without affecting altitude. The gimbal will be placed in low earth orbit in a 1U box with a high resolution camera to capture visual data of Earth. We are sponsored by Aaron Freeman and David Reeves of General Atomics who provide us industry knowledge and access to professional hardware.
Goals and Objectives
We plan on completing the final gimbal design by the end of the Winter 2023 quarter. Spring Quarter will be dedicated to the manufacturing and assembly of the gimbal. This includes 3D printing, aluminum machining, electrical wiring, and controls tuning. By the end of Spring we will have an interactive gimbal and camera to demonstrate at the design review, and eventually send the whole assembly into orbit.
Team Members
Travis Lee - Mechanical - travil3@uci.edu
Qisen Lin - Mechanical/Payload - qisenl1@uci.edu
Brian Fok - Controls/Electrical - bfok@uci.edu
Jacob Ochoa - Electrical/Payload - jacobo2@uci.edu
Brandon Tang - Team Lead - bhtang1@uci.edu
Sponsors/Advisors
Aaron Freeman, General Atomics
David Reeves, General Atomics
David Copp, UCI School of Engineering