
15A Remotely Operated Underwater Robotic Vehicle (ROV)
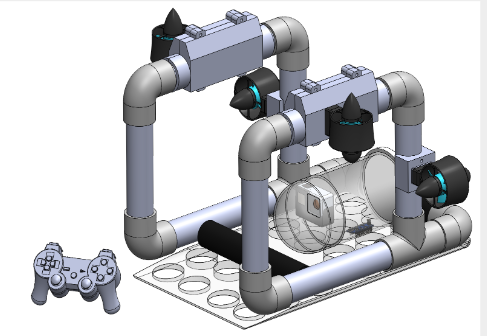
Coastal areas in California attract millions of tourists a year and the more crowded these areas become, the more they are prone to pollution and trash build up. There are a few solutions when it comes to debris collection from bodies of water. We propose an underwater remotely operated vehicle (ROV) capable of maneuvering and object retrieval. Our ROV is nicknamed Archelon and it features applications of modern technology derived from underwater ROV research.
Project status:
Active
Department:
MAE
Term:
Winter
Spring
Academic year:
2023-2024
Winter Poster:
