UCI IGV (Intelligent Ground Vehicle)
Background
Intelligent Ground Vehicles are vehicles that do not rely on the input of a person in order to fulfill their functions. Instead, they rely on information received from GPS sensors, ultrasonic sensors, and other sensors to perform. Autonomous vehicles have a wide application, from military, to research, to commercial uses. They can be used to collect data in unreachable areas, clear areas of hazards, or deliver goods to customers. The use of intelligent ground vehicles has increased drastically over the past years. With the spread of Covid-19, they have become widely used in the contactless delivery of medical supplies and food.
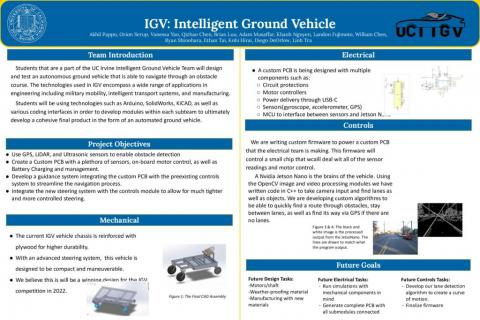
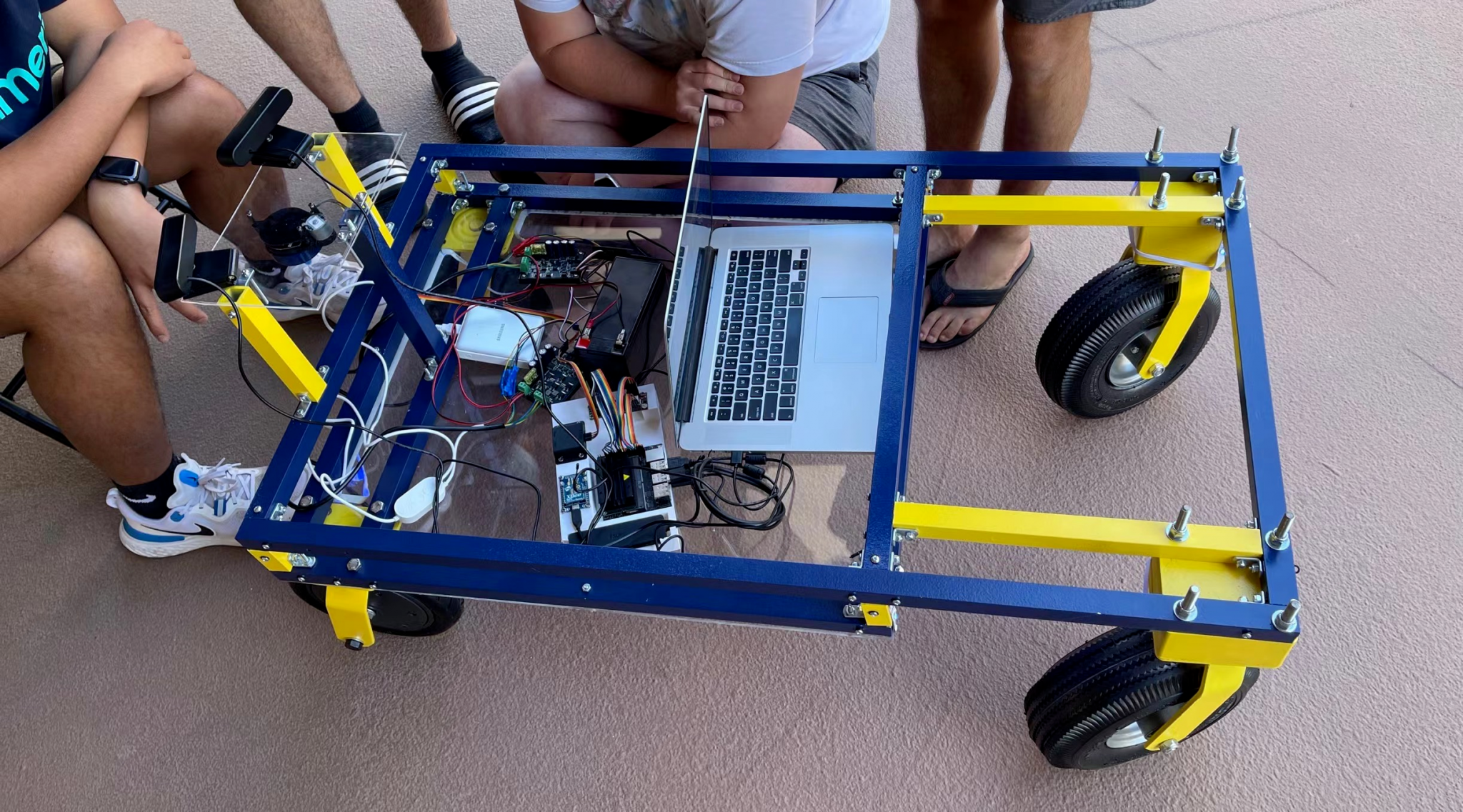
UCI IGV (Intelligent Ground Vehicle) is an MAE Projects design team currently registered under the UCI courses MAE93 and MAE189. This is a student lead project where the group members are divided into three subcategories, Controls, Electrical and Mechanical. The purpose of this project is to design and test an autonomous ground vehicle that will be able to navigate through an obstacle course. The focus of this project will be on modifying the existing steering and propulsion design based on comprehensive analysis. Each team plays a vital role in the project, the Controls Team is responsible for Simulation, Lane navigation, GPS, and Object detection. The Electrical Team is responsible for inspecting all the electrical components and their connections to the source (Battery) as well as designing a PCB to support all of the sensors (accelerometer, GPS, gyrometer). The Mechanical Team is responsible for adjusting the Chassis Design and a well-functioning Steering/DriveTrain such that the vehicle will not veer off course. The mechanical team is using Solidworks for CAD Designing.
Goal and Objectives
The agenda of IGV is to operate as different engineering disciplines acting as one cohesive body with the forward momentum to learn, create, and explore. We have a very diverse team from Recent Sophomores to Graduating Seniors which makes the team stronger as we have new eyes to bring new ideas and innovation to the table. Our goal is to get ready with Mechanical Design, Simulation for controls, and online SmartDraw of the electrical circuits under Electrical Team so that we can begin full deployment by the end of 2022. For the mechanical team, our main challenge will be integrating the steering and propulsion system into our existing chassis. The steering system has to fit within the dimensions of the chassis, be stable enough to handle the weight of the vehicle, and be controllable given our current microcontroller and power distribution. The design, manufacturing, testing, and integration is projected to be completed this quarter. The design is expected to be finished by week 4. The testing will include the accuracy of its steering, how fast it is able to turn, and how well it is able to keep the vehicle stable while moving. As for the propulsion system, the manufacturing, testing, and fabrication are also projected to be completed this quarter. Its testing will include how efficiently it is able to move the vehicle.
Documentation Links
https://docs.google.com/document/d/1XHUAcOrIOBlacIA3jkw2lTA0xjiAiSKh3JnRSQLBfCc/edit?usp=sharing
http://docs.google.com/document/d/1Mhdun55_wsvE8B41Hll6-qRlWhj-15san8klR_nNAf4/edit?usp=sharing
http://docs.google.com/document/d/1EAyce_YSI-Z3UgFrcA4zAuIK0H4bQc3vJzYoogacFuA/edit?usp=sharing
Link to Midterm Presentation:
http://docs.google.com/presentation/d/1a7YObhL5Yxjjhagq8LbAHbYRuEoCKZKCXkdbe84Dqwg/edit?usp=sharing
Team Contacts
Qizhao Chen - qizhaoc@uci.edu
Adam Musaffar - musaffaa@uci.edu
Aris Navarro - arisn@uci.edu,
Advisor
Professor David Copp - dcopp@uci.edu