teAM Radio: Mobile Robot Target Localization Using Passive RFID Technology

Background:
With wifi being so prevelent it is easy to forget that it is not as commonplace as we think. In search and rescue scenarios many first responders often get trapped or injured while on duty with virtually no way to locate them. There are countless factors to take into account that make it impossible to prepare for with traditional tracking software. However, by using a passive RFID tag we can circumvent all the hassles and worries of a lost signal or power source to focus on retrieving lost or injured personnel.
Goal and Objectives:
The goal of this project is to research Radio Frequency Identification and the possible applications it can have with a focus in search and rescue scenarios. Using passive RFID tags that require no power this will allow for countless applications regardless of the area or lack of a signal. This quarter will create an algorithm that allows a robot to locate the said passive RFID tags and determine its location with the help of varying tags and antennas. Our first task is to create a simultion using Matlab of the varying capabilities of our algorithm. Next quarter we hope to apply our algorithm to a real autonomous robot to test it against real-life complications.
Technical Details:
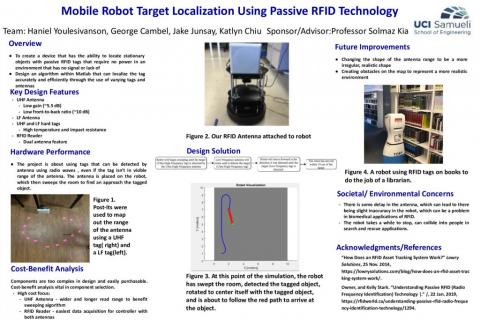
Active RFID tags are very common in helping people find lost ideas, popular brands such as the Apple Tag and Tile have become everday essentials. Passive RFID tags while having no location detection abilities along are a superior choice for search and rescue since they do not need a power souce or a signal. Our design includes a robot fitted with two antenna with different gains, detecting radii, that will help us locate an individual fitted with two passive RFID tags. The antennas work to help locate the position, and the tags work to notifiy us when the robot has arrived to the individual.
Faculy Advisor:
Professor Solmaz Kia ( solmaz@uci.edu)