Intelligent Ground Vehicle
Background
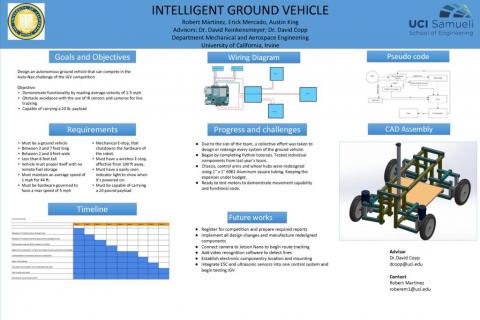
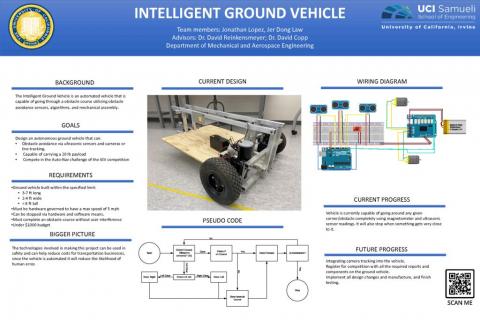
As part of the UC Irvine Intelligent Ground Vehicle team, students will be in charge of designing and testing a vehicle that will be able to autonomously navigate through an obstacle course for participation in the Intelligent Ground Vehicle Competition (IGVC).
The IGVC is a competition that sets an automated vehicle through an obstacle course to reach the final destination utilizing obstacle avoidance sensors, algorithms, and mechanical assembly. The competition challenges engineers and strengthens their skills by being able to build a self-automated vehicle that can complete the course. The Intelligent Ground Vehicle encompasses the very latest technologies impacting industrial development including intelligent transportation systems, military applications, and manufacturing.
Goal and Objectives
Our goal for this project is to utilize the skills we learned to design and program a vehicle that can complete the obstacle course reliably. This involves using obstacle avoidance modules and algorithms such as: Ultrasonic Sensors, radar ranging, PID controllers, Finite State Machine, etc. to complete the course. Our objective is to make an automated vehicle that can carry a 20 lb payload that avoids obstacles and can complete any obstacle course it is set on.
Contacts
Faculty Advisor(s): Prof. David A. Copp, dcopp@uci.edu; Prof. David J. Reinkensmeyer, dreinken@uci.edu
Student Contact(s): Jonathan Lopez, jdlopezm@uci.edu