Autonomous Systems: Unmanned Floating Vehicle
Background
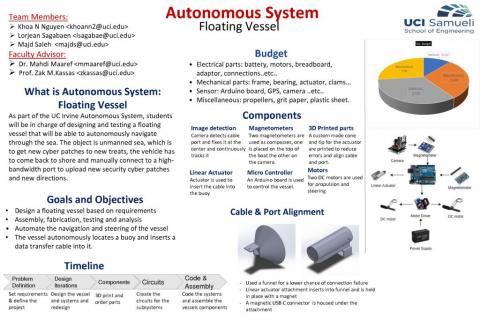
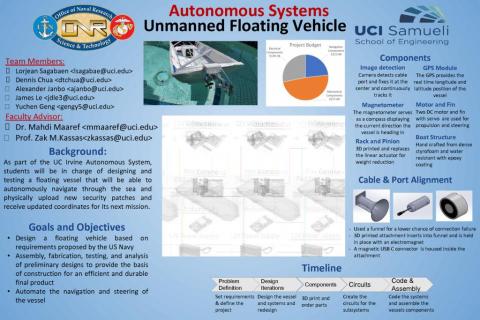
As part of the UC Irvine Autonomous System, students will be in charge of designing and testing a floating vessel that will be able to autonomously navigate through the sea. The vessel will be going to sea unmanned in order to provide updated cyber security patches against new threats. The vehicle has to attach to a buoy and make a physical data connection to a high bandwidth port in order to upload new security patches and receive updated coordinates for its next mission.
Goals & Objectives
- Design a floating vehicle based on requirements proposed by the US Navy
- Assembly, fabrication, testing and analysis of preliminary designs to provide the basis for construction of an efficient and durable final product
- Automate the navigation and steering of the vehicle
- The vehicle autonomously locates a buoy and inserts a data transfer cable into it
Requirements
- The navigation, steering, and propulsion of the vehicle must be entirely autonomous
- Able to maintain physical position despite waves or other natural disruptions to ensure complete data transfer
- Able to receive and transfer data to buoy
- Able to travel to new position coordinates (longitude, latitude) for each mission after getting new data
- Must consist of electronic components not susceptible to foreign data breaches
- Must be waterproof
Innovation & Design Progress
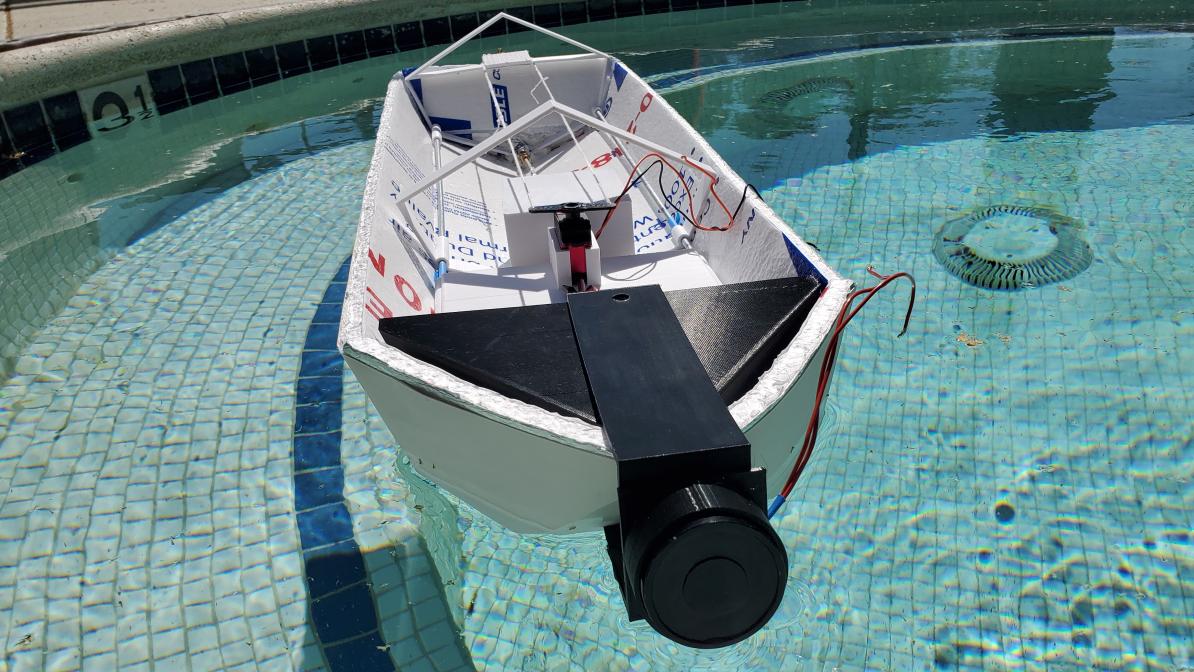
- Structure: The outer frame of the vessel is manufactured from dense styrofoam covered in a thin plastic shell layered with epoxy. This provides an extremely lightweight, buoyant, and water resistant structure. Inside of the vessel we have fabricated a chassis that consists of 3D printed PLA connected by metal rods. The chassis serves to securely mount our propulsion and steering mechanisms as well as providing a platform to safely store our electronics.
- Navigation: Our navigation system consists of a GPS module and magnetometer as sensors and an Arduino. The magnetometer provides the current direction we are heading in, while the GPS gives longitude and latitude. The Arduino automatically uses this information to calculate how to properly adjust the steering and propulsion to direct the vessel towards the target location.
- Image detection: Once we reach a threshold close enough to the buoy the navigation system switches to image recognition. A pixy camera detects a funnel designated in a red color on the buoy. The camera fixes the funnel at the center and continuously tracks it. To ensure a steady connection to the buoy the information from the camera is sent through a PID controller before carefully adjusting the servos and motors to precisely make the connection.
- Micro Controller: An Arduino Uno Board is used to control the vehicle. The board is mounted with an Arduino Motor Shield which serves as an electric speed controller for our motors.
- Movements: A single 12V DC motor attached to a propeller provides the necessary propulsion for the boat. The steering mechanism of the boat consists of a Servo connected to a rudder at the back of the boat with wire.
- Docking: An electromagnet is firmly attached to the vehicle and would activate once it makes contact with the buoy in order to stabilize docking and connection.
- Connection: A rack and pinion with an attachment at the tip to encase the USB cable for connection is used to insert into the funnel attached to the buoy.
- 3D Printed parts: A custom made funnel, rack and pinion system for insertion, holders for the data connector and electromagnet, and frame stabilizers for the boat are printed to reduce the number of relatively heavy electronics and thus reduce the weight of our components.
The Bigger Picture
This project was posed by the Naval Surface Warfare Center in Corona, and is a chance for the team to engineer a solution to a current real-world problem. The group has met once with Richard Carrasco from the Naval Center, who provided feedback about the existing design and suggested improvements going forward. 2019 is the first year of this floating vehicle project at UCI and will serve as an initial example for students taking on similar projects in the future to learn from and improve upon.
Team Contact
Lorjean Sagabaen <lsagabae@uci.edu>
Dennis Chua <dtchua@uci.edu>
Alexander Janbo <ajanbo@uci.edu>
James Le <jdle3@uci.edu>
Yuchen Geng <gengy5@uci.edu
Advisor
Dr. Mahdi Maaref <mmaaref@uci.edu>
Prof. Zak M. Kassas <zkassas@uci.edu>