
Autonomous Systems: Mobile Simulated Buoy Hub
Background
Navy vessels deployed out to sea require a secure way to receive files and updates from shore, and direct long-range wireless communication can leave vessels vulnerable to foreign hacking. It’s wasteful for the vessel to return to base for each of these patches, so a more efficient solution is needed to transmit data over long distances.
Goals & Objectives
- Design a deployable buoy that can autonomously navigate to another vessel and provide a physical data connection
- Buoy will communicate with HQ and serve as a file hub that can be accessed remotely from shore
- Fixed location in the water will be maintained with autonomous GPS-based motor control loop
- Vehicle coordinates, destination, and mission status will be viewable in real-time from a custom GUI on shore
Requirements
- Must be waterproof and fully buoyant
- Able to maintain position despite waves or other disruptions
- Able to remotely receive new file uploads through GUI to be transferred to vessel
- Able to travel to new position coordinates (longitude, latitude) for each mission
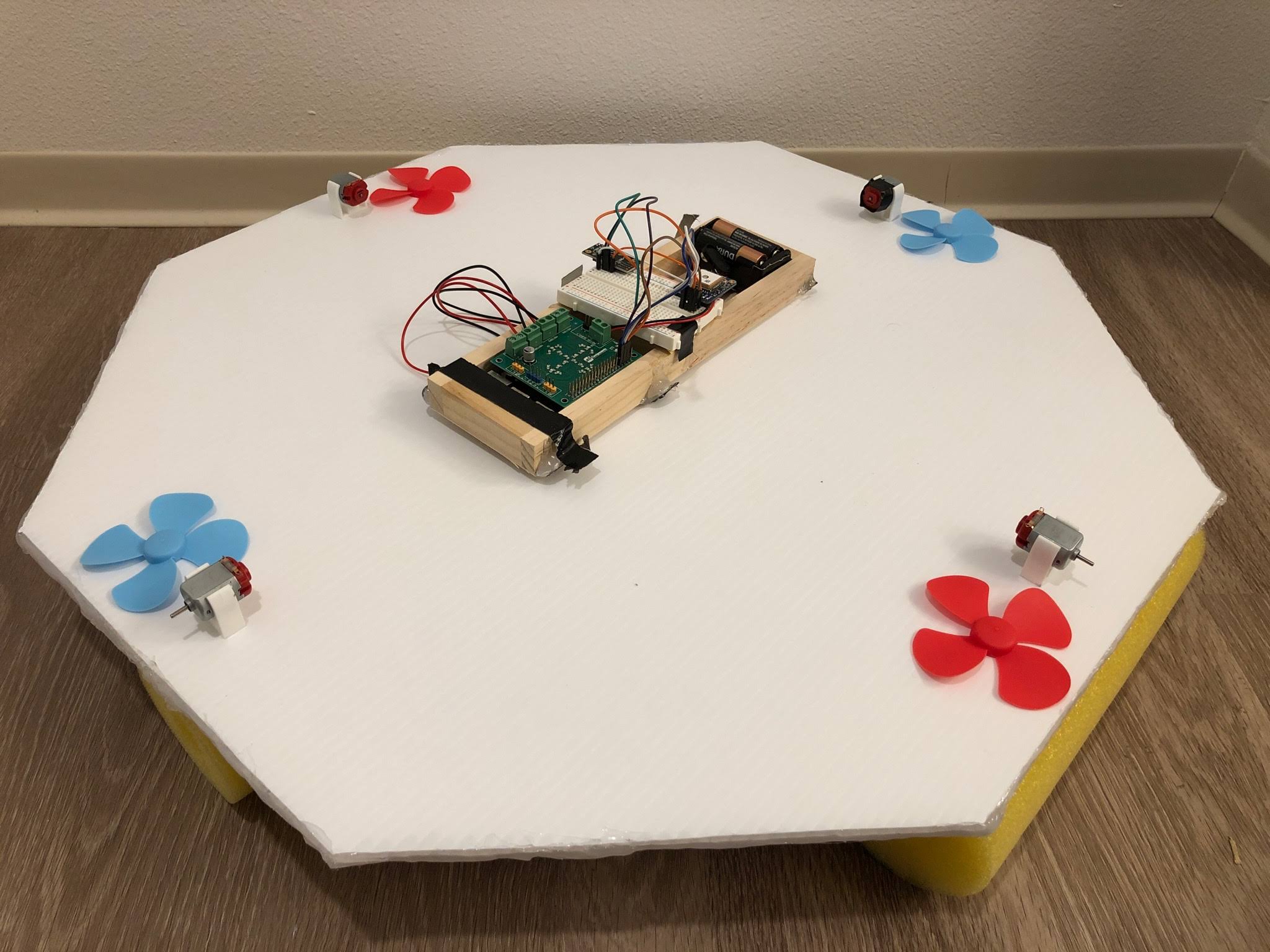
Innovation & Design Progress
- Raspberry Pi onboard for communication and calculations
- Propellers given continuous instruction from RPi’s motor control daughter board and Python program
- GPS module provides current location with 10 Hz refresh rate
- Magnetometer provides current heading relative to North
- Sensor data combined and compared to desired location to determine how to correct error with motor commands
- Auto-refreshing GUI that displays vehicle location, mission progress, and allows for large file upload
The Bigger Picture
This project was posed by the Naval Surface Warfare Center in Corona, and is a chance for the team to engineer a solution to a current real-world problem. The group has met once with Richard Carrasco from the Naval Center, who provided feedback about the existing design and suggested improvements going forward. 2019 is the first year of this buoy project at UCI and will serve as an initial example for students taking on similar projects in the future to learn from and improve upon.
Team Contacts
Joseph Parra <parrajr@uci.edu>
Shyam Patel <shyamap@uci.edu>
Alexander Tayle Kim <alexatk1@uci.edu>
Haniel Youlesivanson <hyoulesi@uci.edu>
Jeffrey Vuong <jeffrecv@uci.edu>
Advisors
Dr. Mahdi Maaref <mmaref@uci.edu>
Prof. Zak M. Kassas <zkassas@uci.edu>
