Project SkyHawk: Parking Assistant Drone System
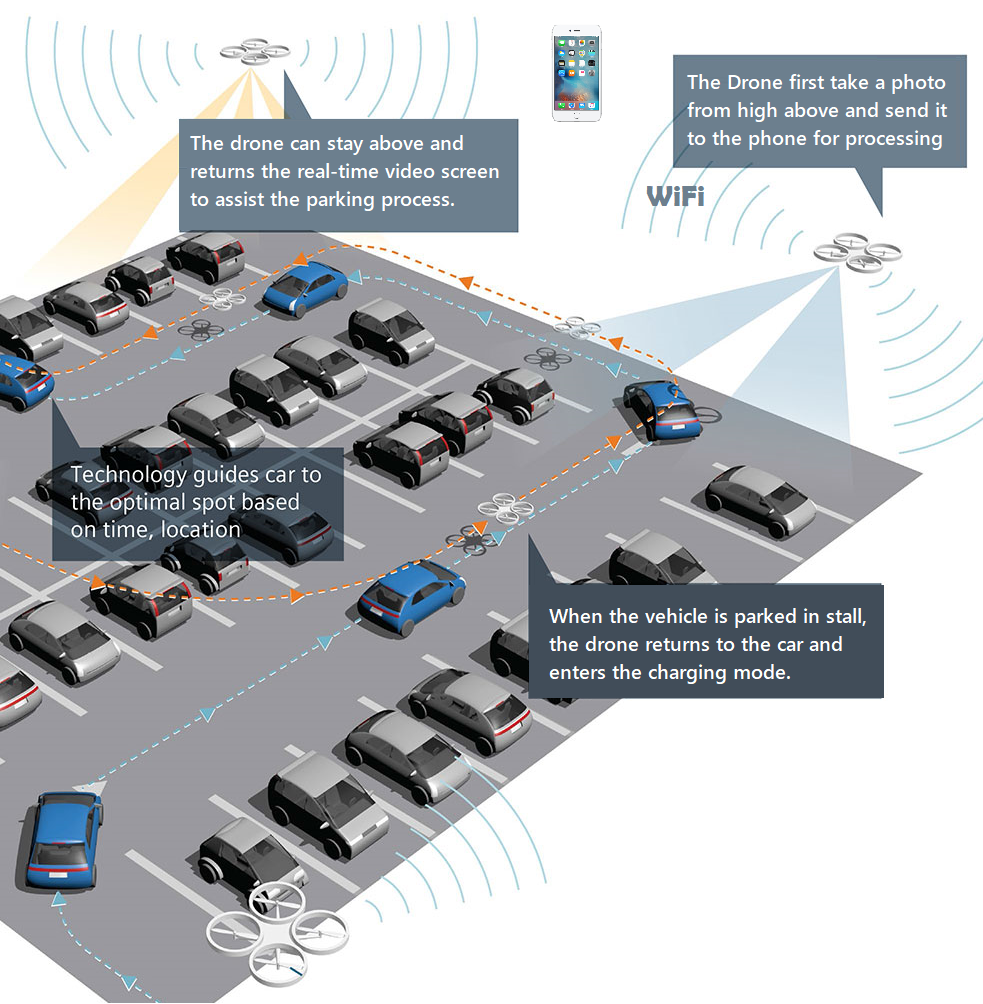
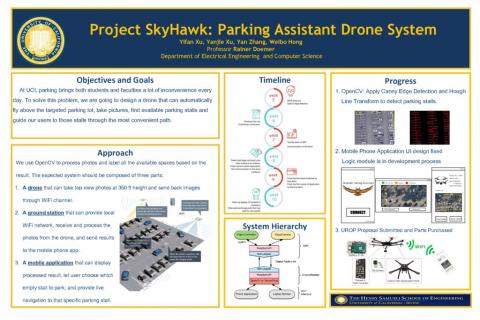
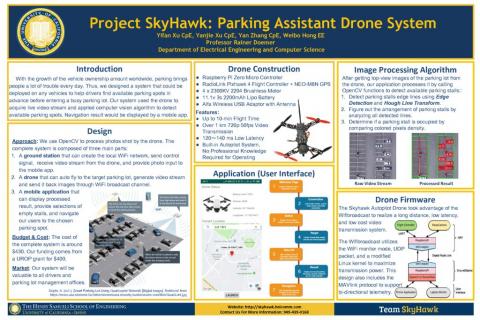
Introduction: With the growth of the number of vehicles ownership worldwide, parking brings people a lot of trouble every day. Thus, we designed a system that could be deployed on any vehicles to help drivers find available parking spots in advance before entering a busy parking lot. Our system used the drone to acquire live video stream and applied computer vision algorithm to detect available parking spots. Navigation result would be displayed by a mobile app.
Approach: We use OpenCV to process photos shot by the drone. The complete system is composed of three main parts:
- A ground station that can create a local WiFi network, send control signal & receive the video stream from the drone, and provide photo input to the mobile app.
- A drone that can auto fly to the target parking lot, generate video stream and send it back images through WiFi broadcast channel.
- A mobile application that can display the processed result, let the user choose which empty spot to park, and provide live navigation to that specific parking spot.
Budget & Cost: The cost of the complete system is around$430. Our funding comes from a UROP grant for $400.
Market: Our system will be valuable to all drivers and parking lot management office.