Zot Tailsitter

Background:
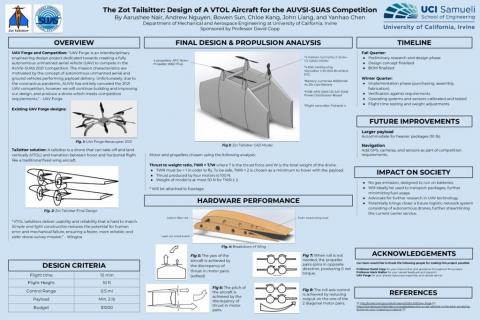
UAV forge needs a new tailsitter drone design that is capable of completing a range of tasks required in Association for the Unmanned Vehicle Systems International Student Unmanned Aerial Systems Competition. The drone will need to take-off and land vertically (VTOL) and transition between hover and horizontal flight like a traditional fixed wing aircraft.
“VTOL tailsitters deliver usability and reliability that is hard to match. Simple and light construction reduces the potential for human error and mechanical failure, ensuring a faster, more reliable, and safer drone survey mission.” - Wingtra
Goals and Objectives:
In the 2 quarter time frame, we as a team aim to achieve to:
- Have a functional prototype capable of vertical take-off, hovering, and transitioning to horizontal flight like a fixwing aircraft.
- Have a maximum altitude of 10 feet and a flight time of approximately 10 minutes.
- Test flights on a specified path to fulfill competition requirements.
Team contacts:
Aarushee Nair aarushen@uci.edu
Chloe Kang cakang@uci.edu
Sponsor:
Professor David Copp dcopp@uci.edu
Acknowledgements:
Our team would like to thank the following people for making this project possible.
- Professor David Copp for your mentorship and guidance throughout this project.
- Professor Mark Walter for your valued feedback and support.
- UAV Forge for your shared resources, expertise, and valued advice.