LIBRA

Introduction
Aeronautics, Dynamics, and Control Laboratory (ADCL) is an interdisciplinary lab focusing on the modeling and analysis using the rigorous mathematical tools of both Geometric Control Theory and Unsteady Aerodynamics to develop non-intuitive new engineering applications. ADCL developed new control algorithm which enables the airplane to achieve high rolling maneuverability in stall. This new rolling algorithm will solve a challenging problem in the aerospace industry, where Airplanes lose the rolling controllability in stall.
LIBRA stands for Lie Bracket Rolling Augmentation Mechanism. Lie Bracket is the geometric control tool which has been used to develop this algorithm. this name inspires the extended freedom by enabling flying in the stall regimes. LieRoll was another name proposed, but was never selected.
Goal
The goal of this project is to demonstrate experimentally the control authority given to the airplane in stall regimes. The experiment is divided into three phases as follows:
Phase I: Wind Tunnel Assessment of Roll and Pitch Control Authority in Stall
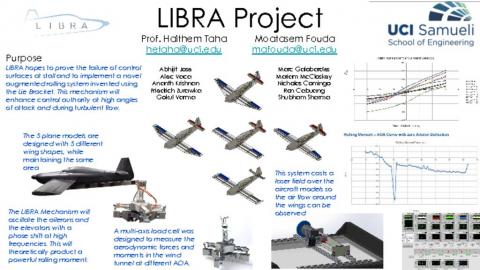
In this phase, the deterioration of the rolling control authority during stall will be assessed using five different airplane models with different wing planforms. These airplane models will be designed specifically for wind tunnel testing at high angles of attack up to 45 degrees. The ailerons and elevators will be controlled by high resolution driving mechanisms. A multi-axis load cell will be designed and constructed to withstand the dynamic loads associated with testing at stall conditions (e.g., buffeting). This load cell shall have a relatively high capacity of 100 Newton and fine sensitivity of 0.1 Newton. the following figure shows the preliminary wind tunnel model and the CAD model, designed for this phase.
Phase II: Wind Tunnel Demonstration of the LIBRA Mechanism
Two similar models will be developed for a selected airplane configuration based on the results of phase I. The first model will be equipped with the LIBRA mechanism, while the second will be equipped with conventional control. Both models will be matched inertially, aerodynamically and of course in the experimental conditions. The performance of the two models will be compared in terms of roll control authority near-, during-, and post-stall.
Phase III: Flight Demonstration of the LIBRA Mechanism
A full-scale mini-UAV model will be developed for the selected airplane configuration in phase II. This model will be radio controlled. The LIBRA mechanism will be installed in addition to the conventional rolling control. The performance of both systems will be assessed during flight near stall.