Robot for Executing Physics Inspired Path Planned

Background
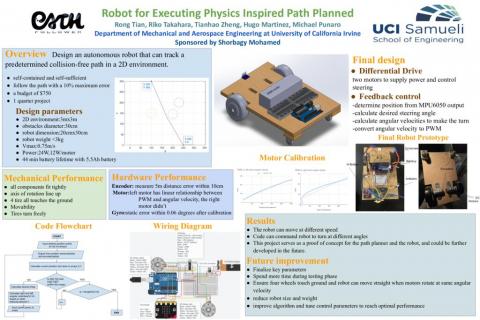
Under the guidance of the project’s sponsor, a group of four undergraduate mechanical engineering students set out to design, construct, and program a robot which is capable of navigating through a preplanned collision-free path in a 2D environment containing circular obstacles with a maximum error of 10% at any point.
Goal and Objectives
The goal of this project is to devise and create an autonomous robot that is capable of executing the required control inputs dictated by the path planning scheme. Our objectives include: building an exclusive environment with obstacles for the robot, planning and designing the code for the novel path planner, and building a robot that is capable of executing the path planner commands.
Innovation:
Considering the weight, durability, and cost, we selected Lego for the main frame and rear suspension's material. Although not frequently chosen by other robots restricted by maximum load, in this case it is the best option since it offers versatility and multi-function at a relatively lower cost for our light-weight and small-size robot.
Team Contact
Rong Tian (email: rongt4@uci.edu)
Sponsor
Shorbagy Mohamed (email: mohamem2@uci.edu)