Summary
In this project, we developed a Physics-Informed Neural Network using PyTorch in Python to solve a specific Partial Differential Equation (Burger’s Equation in our case) under defined initial and boundary conditions. Our approach involved optimizing various parameters crucial to the neural network's performance, such as the choice of activation functions, optimizers, the configuration of neurons and layers, and the selection of an appropriate loss function.
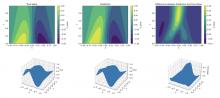
To enhance the model's performance, we introduced a customized loss function that is divided into two components: one addressing the loss incurred by satisfying the PDEs, and the other handling the loss associated with meeting the Boundary and Initial Conditions. Through parameter tuning and training, we achieved a notable Mean Absolute Error of approximately 0.0533, surpassing the required threshold of 0.06.
Visualizations, including both 3D and 2D representations, were utilized to effectively illustrate the outcomes of our machine learning model. Our future endeavors involve refining the model further by incorporating weight coefficients into our customized loss function, aiming for even higher levels of accuracy and efficiency.