Autonomous Underwater Vehicle
Background
Since the appearance of miniature mechanical systems on silicon (MEMS) and the development of microcontrollers, wireless communications, and 3D printing, small robots are continuously utilized in various applications throughout the world. From microrobots capable of exploring collapsed buildings for survivors in cases of natural disasters and ocean exploration, to having a major role in biomedical procedures, microrobots are often deployed in areas that are inaccessible for humans to go. Many times, however, these areas are in mediums where radiocommunication is not available, such as underwater. In those situations, autonomous vehicles operating in a self sufficient way without human input are a great solution. Additionally, having multiple robots that can utilize local communication to self-organize and coordinate with each other towards a common goal can create many more opportunities to utilize their functions.
Goal and Objectives
- Team Organization with new team members (Week 2)
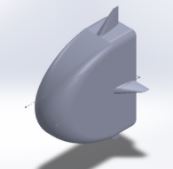
- Redesign the AUV body to be more hydrodynamic and stable + Testing on individual electronic components + Solidworks flow simulations on the robot (Week 3-4)
- Create a virtual prototype of the robot with every required component and optimize how those components will work together + Fabrication of robot chassis (Week 5)
- Test the individual components of the robot underwater (Week 6-7)
- Manufacture the first prototype of the robot and combine all the components for additional testing (Week 8-9)
- Complete the first prototype and realize our goal of having the robot attach autonomously to a specified item on the bottom of a swimming pool (water tank). (Week 10)
Required Functions
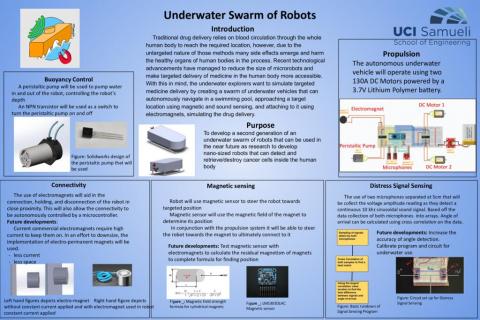
1) The robot will use a set of motors that will be connected to a microcontroller to drive the propellers and displace it.
2) The robot will use a peristaltic pump to modulate the water inside a tank located within the robot to control the buoyancy.
3) For the connection of the robots, electro-magnets will be used. These electro-magnets create a magnetic field once current is applied to it. On the opposite side of the robot, a metallic strip will be used to connect the electro-magnet to. For a more advanced prototype, smaller electropermanent-magnets are being considered as a possible alternative to the electro-magnets.
4) The robot will be using a combination of acoustic and magnetic sensing to navigate its way towards its objective. The robot will use a feedback control on the intensity of a >1kHz sound signal to localize a single target in the tank. The controller is based on a simple sound intensity model. This model will be verified and fit in Winter of 2022. Once it is in range of the magnetic field created by the magnet in the end position the robot will use a magnetometer to approach the magnet more accurately.
Team Contacts
Varn Saechao - saechaov@uci.edu
Christian Loyola - Loyolac@uci.edu
Jose Gilbert - josetg@uci.edu
Mike Sutherland - msutherl@uci.edu
Ohtli Garcia - ogarciab@uci.edu
Sponsor/Advisor
Camilo Velez - cvelezcu@uci.edu